分布式消息队列RocketMQ
第1章RocketMQ概述
1、MQ简介
MQ,MessageQueue,是一种提供消息队列服务的中间件,也称为消息中间件,是一套提供了消息生产、存储、消费全过程API的软件系统。消息即数据。一般消息的体量不会很大。
2、MQ用途
从网上可以查看到很多的关于MQ用途的叙述,但总结起来其实就以下三点:
限流削峰MQ可以将系统的
超量请求暂存其中,以便系统后期可以慢慢进行处理,从而避免了请求的丢失或系统被压垮。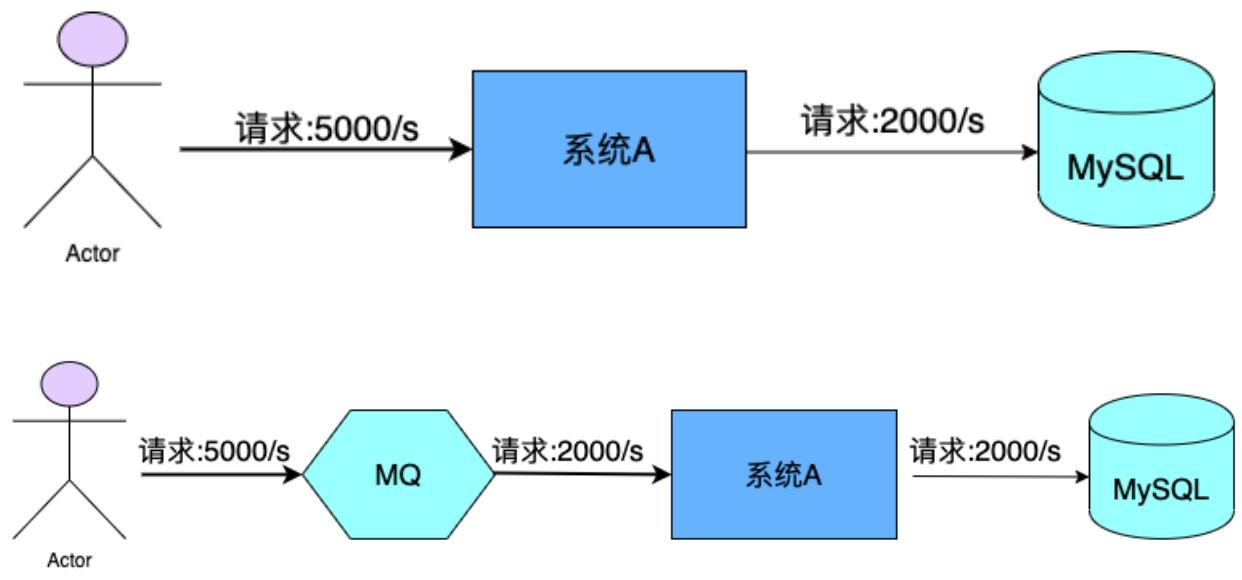
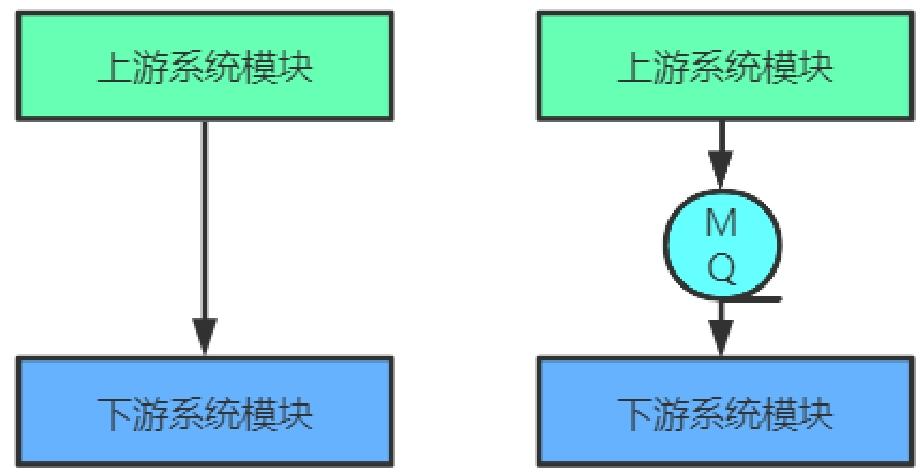
异步解耦上游系统对下游系统的调用若为同步调用,则会大大降低系统的吞吐量与并发度,且系统耦合度太高。而异步调用则会解决这些问题。所以两层之间若要实现由同步到异步的转化,一般性做法就是,在这两层间添加一个MQ层。
数据收集分布式系统会产生海量级数据流,如:业务日志、监控数据、用户行为等。针对这些数据流进行实时或批量采集汇总,然后对这些数据流进行大数据分析,这是当前互联网平台的必备技术。通过MQ完成此类数据收集是最好的选择。
3、常见MQ产品
ActiveMQ:
- ActiveMQ是使用Java语言开发的一款MQ产品。早期很多公司与项目中都在使用,但现在的社区活跃度已经很低,现在的项目中已经很少使用了。
RabbitMQ:
- RabbitMQ是使用ErLang语言开发的一款MQ产品。其吞吐量较Kafka与RocketMQ要低,且由于其不是Java语言开发,所以公司内部对其实现定制化开发难度较大。
Kafka:
- Kafka是使用Scala/Java语言开发的一款MQ产品。其最大的特点就是高吞吐率,常用于大数据领域的实时计算、日志采集等场景。其没有遵循任何常见的MQ协议,而是使用自研协议。对于SpringCloudNetflix一代,其仅支持RabbitMQ与Kafka。
RocketMQ:
- RocketMQ是使用Java语言开发的一款MQ产品。经过数年阿里双11的考验,性能与稳定性非常高。其没有遵循任何常见的MQ协议,而是使用自研协议。对于SpringCloudAlibaba,其支持RabbitMQ、Kafka,但提倡使用RocketMQ。
| 关键词 | ACTIVEMQ | RABBITMQ | KAFKA | ROCKETMQ |
|---|---|---|---|---|
| 开发语言 | Java | ErLang | Java | Java |
| 单机吞吐量 | 万级 | 万级 | 十万级 | 十万级 |
| Topic | - | - | 百级Topic时会影响系统吞吐量 | 千级Topic时会影响系统吞吐量 |
| 社区活跃度 | 低 | 高 | 高 | 高 |
4、MQ常见协议
一般情况下MQ的实现是要遵循一些常规性协议的。常见的协议如下:
JMS:
- JMS,JavaMessagingService(Java消息服务),是Java平台上有关MOM(Message Oriented Middleware),面向消息的中间件PO(面向过程)/OO(面向对象)/AO(面向切面)的技术规范,它便于消息系统中的Java应用程序进行消息交换,并且通过提供标准的产生、发送、接收消息的接口,简化企业应用的开发。ActiveMQ是该协议的典型实现。
STOMP:
- STOMP,Streaming Text Orientated Message Protocol(面向流文本的消息协议),是一种MOM设计的简单文本协议。STOMP提供一个可互操作的连接格式,允许客户端与任意STOMP消息代理(Broker)进行交互。ActiveMQ是该协议的典型实现,RabbitMQ通过插件可以支持该协议。
AMQP:
- AMQP,Advanced Message Queuing Protocol(高级消息队列协议),一个提供统一消息服务的应用层标准,是应用层协议的一个开放标准,是一种MOM设计。基于此协议的客户端与消息中间件可传递消息,并不受客户端/中间件不同产品,不同开发语言等条件的限制。RabbitMQ是该协议的典型实现。
MQTT:
- MQTT,Message Queuing Telemetry Transport(消息队列遥测传输),是IBM开发的一个即时通讯协议,是一种二进制协议,主要用于服务器和低功耗IoT(物联网)设备间的通信。该协议支持所有平台,几乎可以把所有联网物品和外部连接起来,被用来当做传感器和致动器的通信协议。RabbitMQ通过插件可以支持该协议。
二、RocketMQ概述
1、RocketMQ简介
 RocketMQ是一个统一消息引擎、轻量级数据处理平台。
RocketMQ是一个统一消息引擎、轻量级数据处理平台。
RocketMQ是⼀款阿⾥巴巴开源的消息中间件。2016年11⽉28⽇,阿⾥巴巴向Apache软件基⾦会捐赠RocketMQ,成为Apache孵化项⽬。2017年9⽉25⽇,Apache宣布RocketMQ孵化成为Apache顶级项⽬(TLP),成为国内⾸个互联⽹中间件在Apache上的顶级项⽬。
官网地址:https://rocketmq.apache.org。
2、RocketMQ发展历程

- 2007年,阿里开始五彩石项目,Notify作为项目中
交易核心消息流转系统,应运而生。Notify系统是RocketMQ的雏形。 - 2010年,B2B大规模使用ActiveMQ作为阿里的消息内核。阿里急需一个具有
海量堆积能力的消息系统。 - 2011年初,Kafka开源,淘宝中间件团队在对Kafka进行深入研究后,开发了一款新的MQ——MetaQ。
- 2012年,MetaQ发展到了v3.0版本,在它基础上进行了进一步的抽象,形成了RocketMQ,然后就将其进行了开源。
- 2015年,阿里在RocketMQ的基础上,又推出了一款专门针对阿里云上用户的消息系统AliwareMQ。
- 2016年双十一,RocketMQ承载了
万亿级消息的流转,跨越了一个新的里程碑。11⽉28⽇,阿⾥巴巴向Apache软件基⾦会捐赠RocketMQ,成为Apache孵化项⽬。 - 2017年9⽉25⽇,Apache宣布RocketMQ孵化成为Apache顶级项⽬(TLP),成为国内⾸个互联⽹中间件在Apache上的顶级项⽬。
第2章RocketMQ的安装与启动
一、基本概念
1、消息(Message)
消息是指,消息系统所传输信息的物理载体,生产和消费数据的最小单位,每条消息必须属于一个主题。
2、主题(Topic)
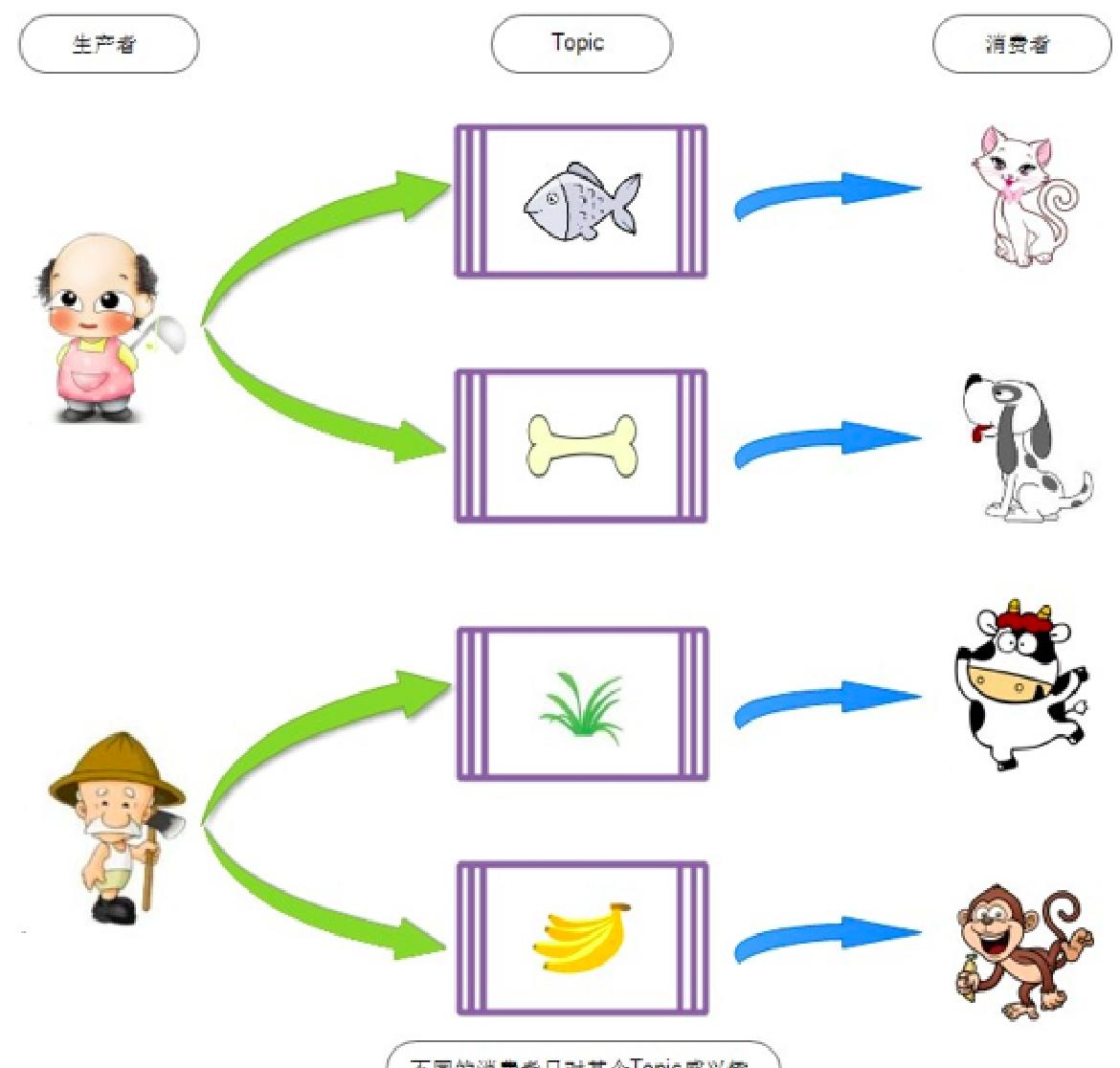
Topic表示一类消息的集合,每个主题包含若干条消息,每条消息只能属于一个主题,是RocketMQ进行消息订阅的基本单位。topic:message 1:n message:topic 1:1
一个生产者可以同时发送多种Topic的消息;而一个消费者只对某种特定的Topic感兴趣,即只可以订阅和消费一种Topic的消息。producer:topic 1:n consumer:topic 1:1
3、标签(Tag)
为消息设置的标签,用于同一主题下区分不同类型的消息。来自同一业务单元的消息,可以根据不同业务目的在同一主题下设置不同标签。标签能够有效地保持代码的清晰度和连贯性,并优化RocketMQ提供的查询系统。消费者可以根据Tag实现对不同子主题的不同消费逻辑,实现更好的扩展性。
Topic:货物
tag=上海
tag=江苏
tag=浙江
——-消费者—-
topic=货物tag=上海
topic=货物tag=上海|浙江
topic=货物tag=*
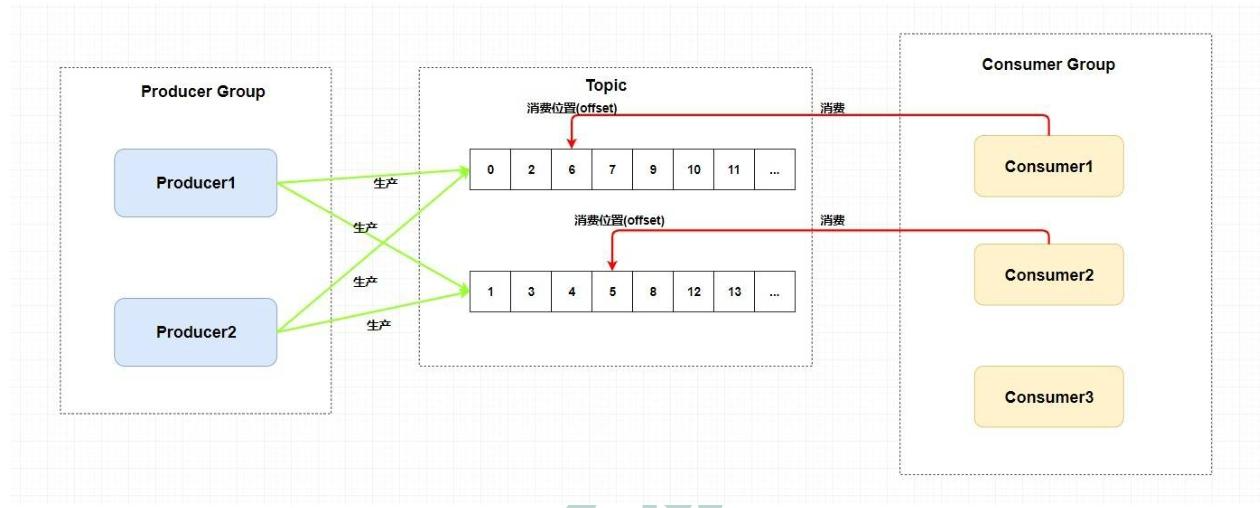
4、队列(Queue)
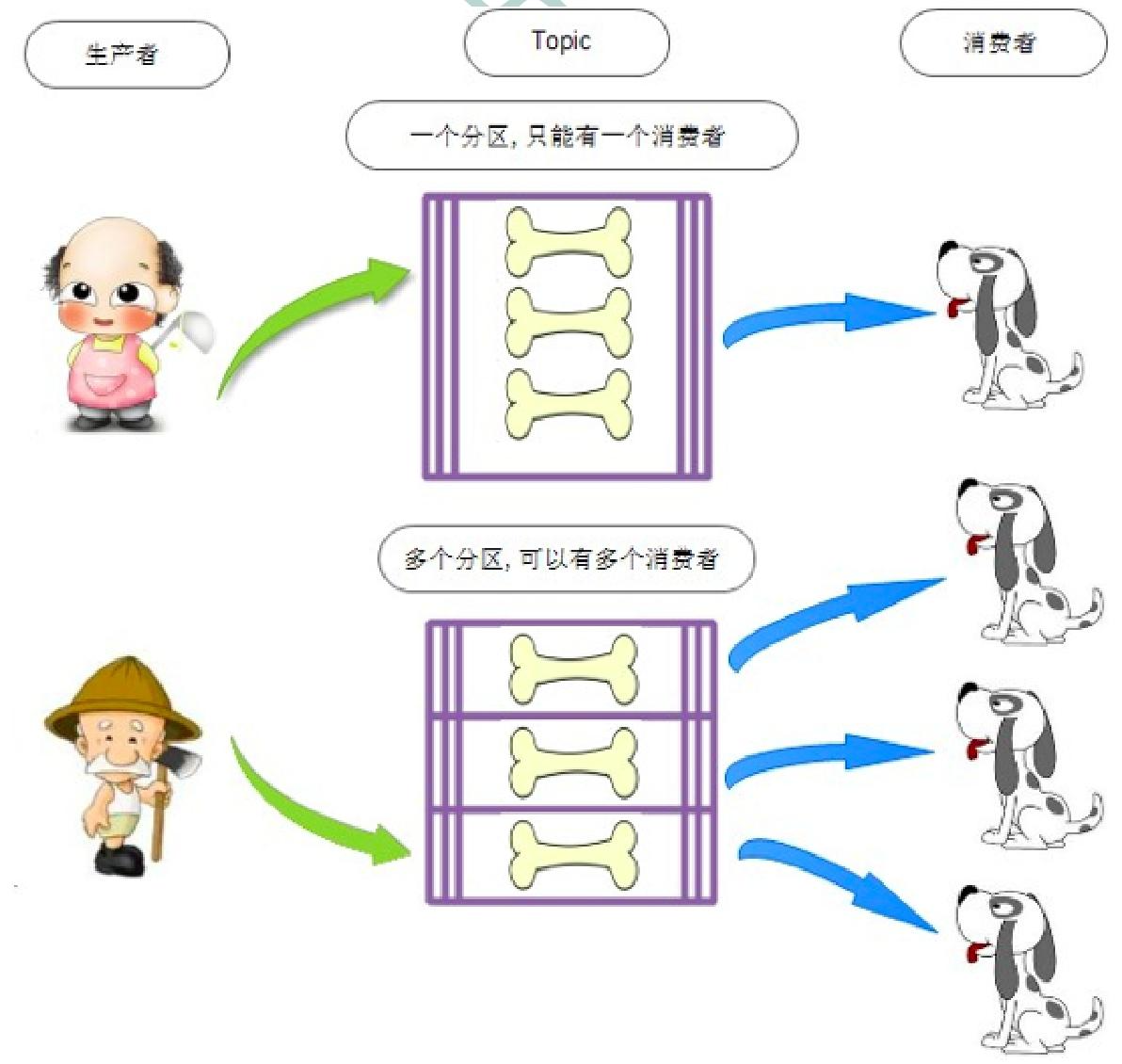
存储消息的物理实体。一个Topic中可以包含多个Queue,每个Queue中存放的就是该Topic的消息。一个Topic的Queue也被称为一个Topic中消息的分区(Partition)。
一个Topic的Queue中的消息只能被一个消费者组中的一个消费者消费。一个Queue中的消息不允许同一个消费者组中的多个消费者同时消费。
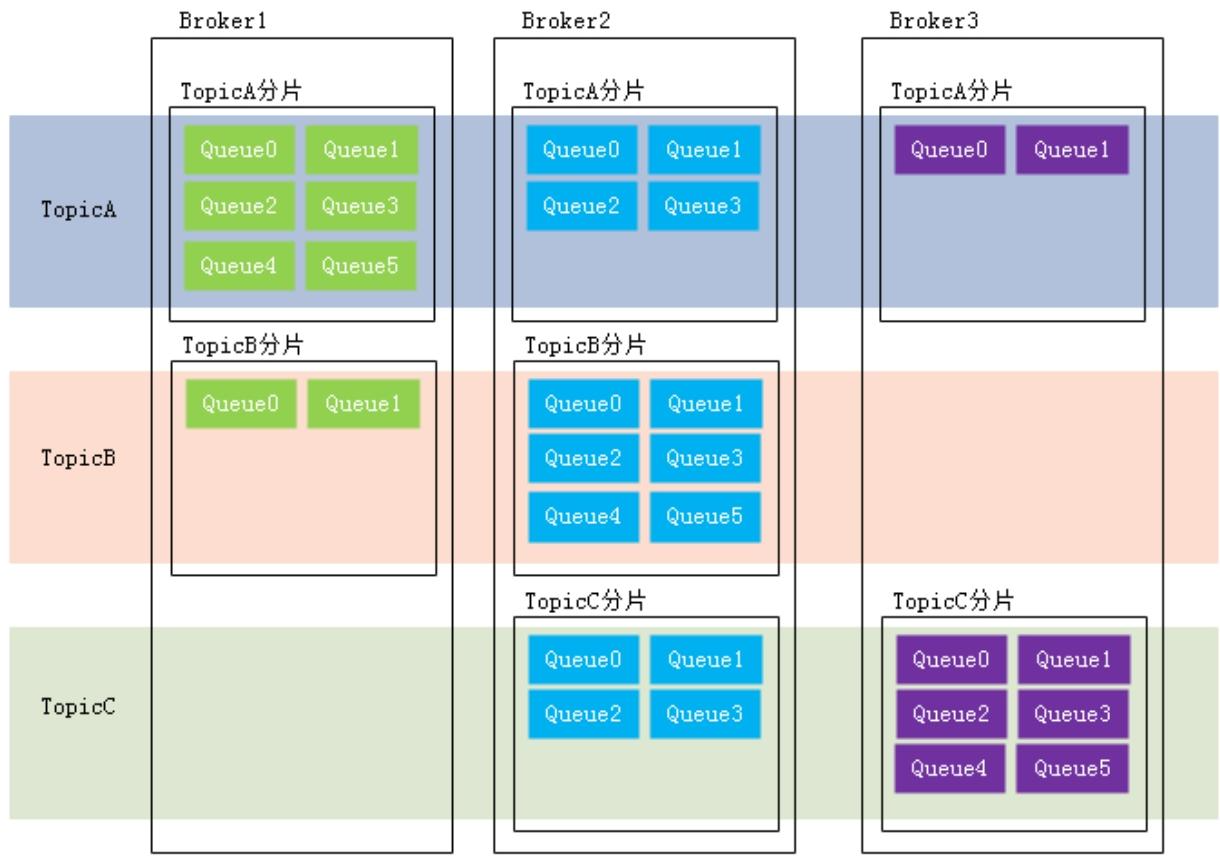
在学习参考其它相关资料时,还会看到一个概念:分片(Sharding)。分片不同于分区。在RocketMQ中,分片指的是存放相应Topic的Broker。每个分片中会创建出相应数量的分区,即Queue,每个Queue的大小都是相同的。
5、消息标识(MessageId/Key)
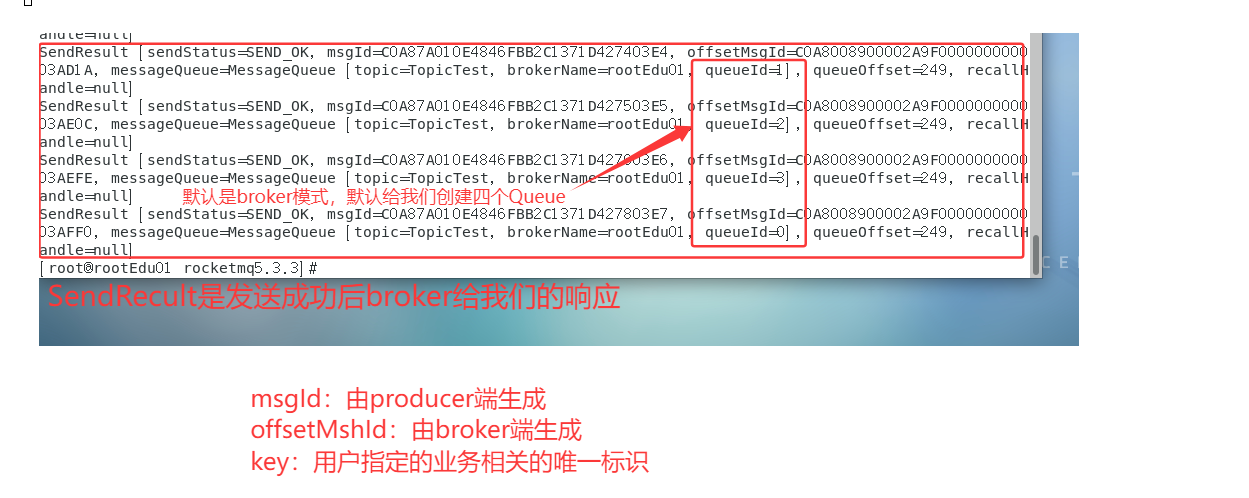
RocketMQ中每个消息拥有唯一的MessageId,且可以携带具有业务标识的Key,以方便对消息的查询。不过需要注意的是,MessageId有两个:在生产者send()消息时会自动生成一个MessageId(msgId),当消息到达Broker后,Broker也会自动生成一个MessageId(offsetMsgId)。msgId、offsetMsgId与key都称为消息标识。
msgId:由producer端生成,规则为:
producerIp+进程pid+MessageClientID Setter类的ClassLoader的hashCode+当前时间+AutomicInteger自增计数器。
offsetMsgId:
由broker端生成,规则为“brokerIp+物理分区的offset(Queue中的偏移量)。
key:由用户指定的业务相关的唯一标识。
二、系统架构
RocketMQ release-5.2.0版本
NameServer启动最核心的 3个事情是:
- 加载配置:NameServerConfig、NettyServerConfig主要是映射配置文件,并创建 NamesrvController。
- 启动 Netty通信服务:NettyRemotingServer是 NameServer和Broker,Producer,Consumer通信的底层通道 Netty服务器。
- 启动定时器和钩子程序:NameServerController实例一方面处理 Netty接收到消息后,一方面内部有多个定时器和钩子程序,它是 NameServer的核心控制器。
NameServer遵守了 CAP理论中 AP,在一个 NameServer集群中,NameServer节点之间是P2P(Peer to Peer)的对等关系,并且 NameServer之间并没有通信,减少很多不必要的网络开销,即便只剩一个 NameServer节点也能继续工作,足以保证高可用。
NameServer底层解析:https://developer.aliyun.com/article/1619575
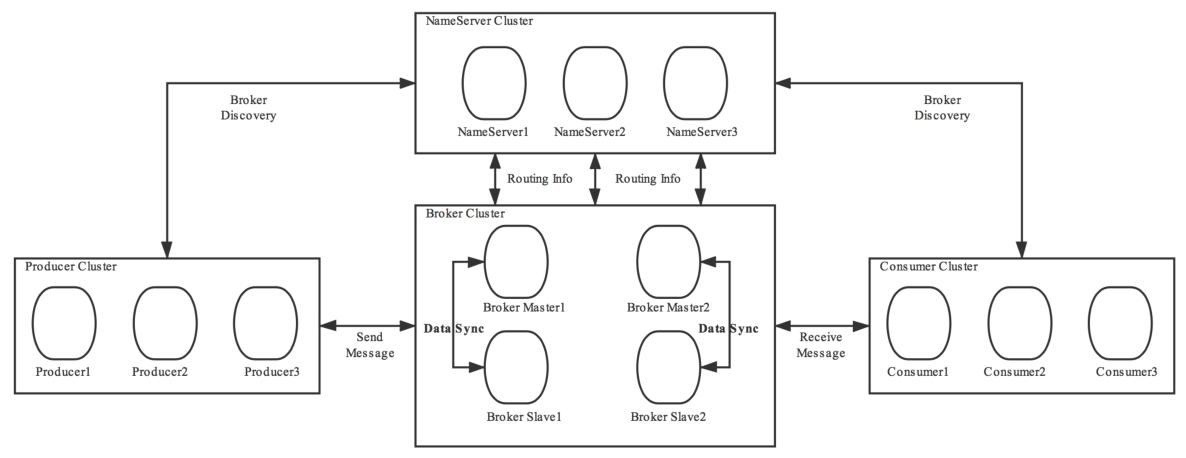
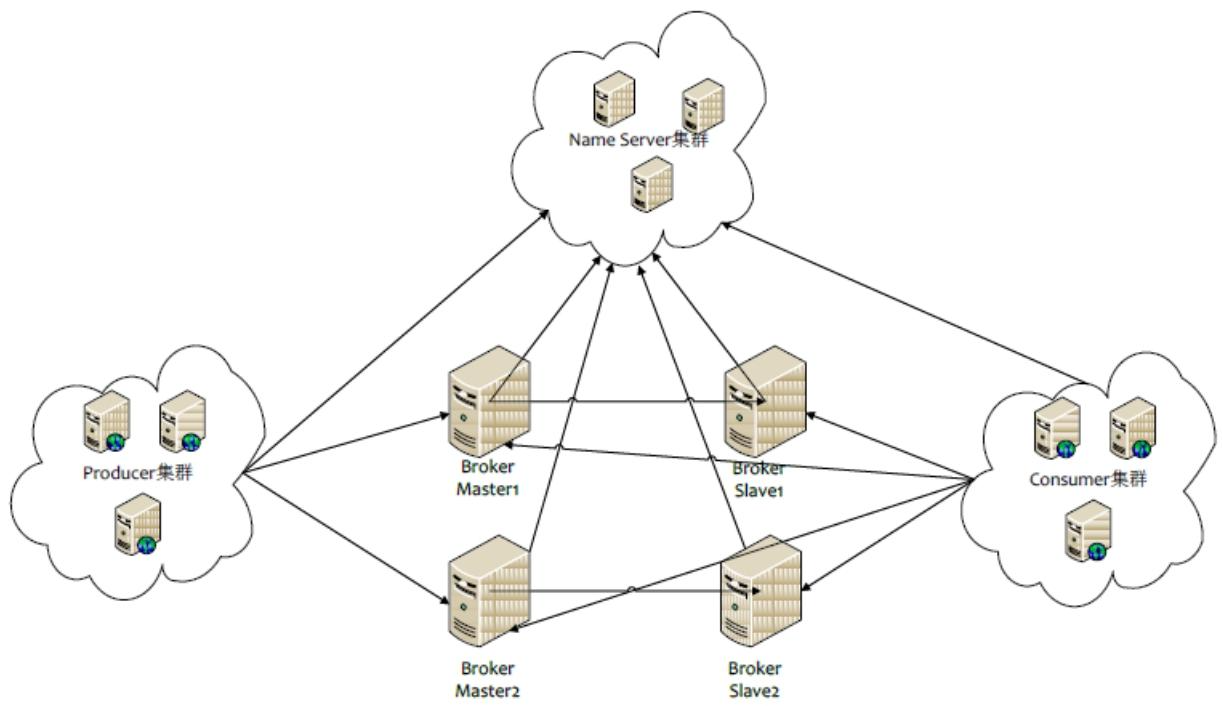
RocketMQ架构主要分为四部分:
1、Producer
消息生产者,负责生产消息。Producer通过MQ的负载均衡模块选择相应的Broker集群队列进行消息投递,投递的过程支持快速失败并且低延迟。
例如,业务系统产生的日志写入到MQ的过程,就是消息生产的过程
再如,电商平台中用户提交的秒杀请求写入到MQ的过程,就是消息生产的过程
RocketMQ中的消息生产者都是以生产者组(ProducerGroup)的形式出现的。生产者组是同一类生产者的集合,这类Producer发送相同Topic类型的消息。一个生产者组可以同时发送多个主题的消息。
2、Consumer
消息消费者,负责消费消息。一个消息消费者会从Broker服务器中获取到消息,并对消息进行相关业务处理。
例如,QoS系统从MQ中读取日志并对日志进行解析处理的过程,就是消息消费的过程
再如,电商平台的业务系统从MQ中读取到秒杀请求并对请求进行处理的过程,就是消息消费的过程。
RocketMQ中的消息消费者都是以消费者组(Consumer Group)的形式出现的。消费者组是同一类消费者的集合,这类Consumer消费的是同一个Topic类型的消息。消费者组使得在消息消费方面,实现负载均衡(将一个Topic中的不同的Queue平均分配给同一个Consumer Group的不同的Consumer,注意,并不是将消息负载均衡)和容错(一个Consmer挂了,该Consumer Group中的其它Consumer可以接着消费原Consumer消费的Queue)的目标变得非常容易。
 消费者组中Consumer的数量应该小于等于订阅Topic的Queue数量。如果超出Queue数量,则多出的Consumer将不能消费消息。
消费者组中Consumer的数量应该小于等于订阅Topic的Queue数量。如果超出Queue数量,则多出的Consumer将不能消费消息。
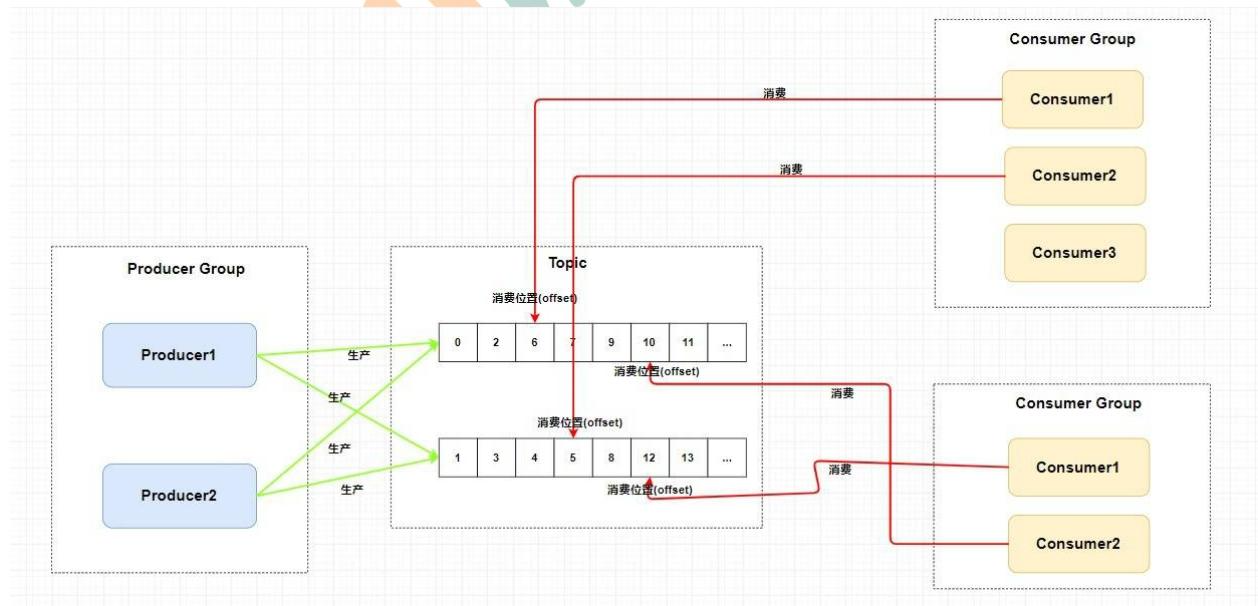 不过,一个Topic类型的消息可以被多个消费者组同时消费。
不过,一个Topic类型的消息可以被多个消费者组同时消费。
注意:
- 消费者组只能消费一个Topic的消息,不能同时消费多个Topic消息。
- 一个消费者组中的消费者必须订阅完全相同的Topic。
3、NameServer
功能介绍
NameServer是一个Broker与Topic路由的注册中心,支持Broker的动态注册与发现。
RocketMQ的思想来自于Kafka,而Kafka是依赖了Zookeeper的。所以,在RocketMQ的早期版本,即在MetaQv1.0与v2.0版本中,也是依赖于Zookeeper的。从MetaQv3.0,即RocketMQ开始去掉了Zookeeper依赖,使用了自己的NameServer。
主要包括两个功能:
Broker管理:接受Broker集群的注册信息并且保存下来作为路由信息的基本数据;提供心跳检测机制,检查Broker是否还存活。路由信息管理:每个NameServer中都保存着Broker集群的整个路由信息和用于客户端查询的队列信息。Producer和Conumser通过NameServer可以获取整个Broker集群的路由信息,从而进行消息的投递和消费。
路由注册
NameServer通常也是以集群的方式部署,不过,NameServer是无状态的,即NameServer集群中的各个节点间是无差异的,各节点间相互不进行信息通讯。那各节点中的数据是如何进行数据同步的呢?在Broker节点启动时,轮询NameServer列表,与每个NameServer节点建立长连接,发起注册请求。在NameServer内部维护着⼀个Broker列表,用来动态存储Broker的信息。
注意,这是与其它像Zookeeper、Eureka、Nacos等注册中心不同的地方。
这种NameServer的无状态方式,有什么优缺点:
优点:NameServer集群搭建简单,扩容简单。
缺点:对于Broker,必须明确指出所有NameServer地址。否则未指出的将不会去注册。也正因为如此,NameServer并不能随便扩容。因为,若Broker不重新配置,新增的NameServer对于Broker来说是不可见的,其不会向这个NameServer进行注册。
Broker节点为了证明自己是活着的,为了维护与NameServer间的长连接,会将最新的信息以心跳包的方式上报给NameServer,每30秒发送一次心跳。心跳包中包含BrokerId、Broker地址(IP+Port)、Broker名称、Broker所属集群名称等等。NameServer在接收到心跳包后,会更新心跳时间戳,记录这个Broker的最新存活时间。
路由剔除
由于Broker关机、宕机或网络抖动等原因,NameServer没有收到Broker的心跳,NameServer可能会将其从Broker列表中剔除。
NameServer中有⼀个定时任务,每隔10秒就会扫描⼀次Broker表,查看每一个Broker的最新心跳时间戳距离当前时间是否超过120秒,如果超过,则会判定Broker失效,然后将其从Broker列表中剔除。
扩展:对于RocketMQ日常运维工作,例如Broker升级,需要停掉Broker的工作。OP需要怎么做?
OP需要将Broker的读写权限禁掉。一旦client(Consumer或Producer)向broker发送请求,都会收到broker的NO_PERMISSION响应,然后client会进行对其它Broker的重试。
当OP观察到这个Broker没有流量后,再关闭它,实现Broker从NameServer的移除。
OP:运维工程师
SRE:SiteReliabilityEngineer,现场可靠性工程师
路由发现
RocketMQ的路由发现采用的是Pull模型。当Topic路由信息出现变化时,NameServer不会主动推送给客户端,而是客户端定时拉取主题最新的路由。默认客户端每30秒会拉取一次最新的路由。
扩展:
1)Push模型:推送模型。其实时性较好,是一个“发布-订阅”模型,需要维护一个长连接。而长连接的维护是需要资源成本的。该模型适合于的场景:
- 实时性要求较高
- Client数量不多,Server数据变化较频繁
2)Pull模型:拉取模型。存在的问题是,实时性较差。
3)LongPolling模型:长轮询模型。其是对Push与Pull模型的整合,充分利用了这两种模型的优势,屏蔽了它们的劣势。
客户端NameServer选择策略
这里的客户端指的是Producer与Consumer
客户端在配置时必须要写上NameServer集群的地址,那么客户端到底连接的是哪个NameServer节点呢?客户端首先会生成一个随机数,然后再与NameServer节点数量取模,此时得到的就是所要连接的节点索引,然后就会进行连接。如果连接失败,则会采用round-robin策略,逐个尝试着去连接其它节点。
首先采用的是随机策略进行的选择,失败后采用的是轮询策略
扩展:ZookeeperClient是如何选择ZookeeperServer的?
简单来说就是,经过两次Shuffle(洗牌),然后选择第一台ZookeeperServer。
详细说就是,将配置文件中的zkserver地址进行第一次shufæe,然后随机选择一个。这个选择出
的一般都是一个hostname。然后获取到该hostname对应的所有ip,再对这些ip进行第二次
shufæe,从shufæe过的结果中取第一个server地址进行连接。
4、Broker
具体Broker底层原理,请访问:https://developer.aliyun.com/article/1337958
功能介绍
Broker充当着消息中转角色,负责存储消息、转发消息。Broker在RocketMQ系统中负责接收并存储从生产者发送来的消息,同时为消费者的拉取请求作准备。Broker同时也存储着消息相关的元数据,包括消费者组消费进度偏移offset、主题、队列等。
Kafka0.8版本之后,offset是存放在Broker中的,之前版本是存放在Zookeeper中的。
模块构成
下图为BrokerServer的功能模块示意图。
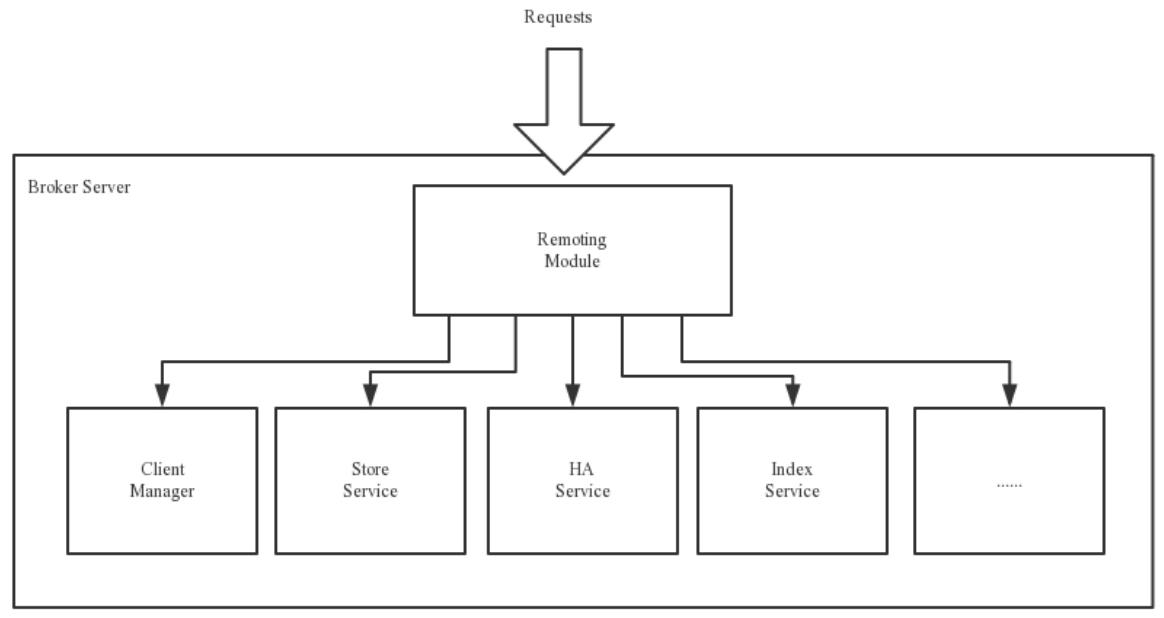
BrokerServer的功能模块包括:
RemotingModule:整个Broker的实体,负责处理来自clients端的请求。而这个Broker实体则由以下模块构成。ClientManager:客户端管理器。负责接收、解析客户端(Producer/Consumer)请求,管理客户端。例如,维护Consumer的Topic订阅信息StoreService:存储服务,提供API接口处理消息存储到物理硬盘和消息查询功能。HAService:高可用服务,提供MasterBroker和SlaveBroker之间的数据同步功能。IndexService:索引服务,根据特定Messagekey,对投递到Broker的消息进行索引,同时提供根据MessageKey快速查询消息的功能。
集群部署
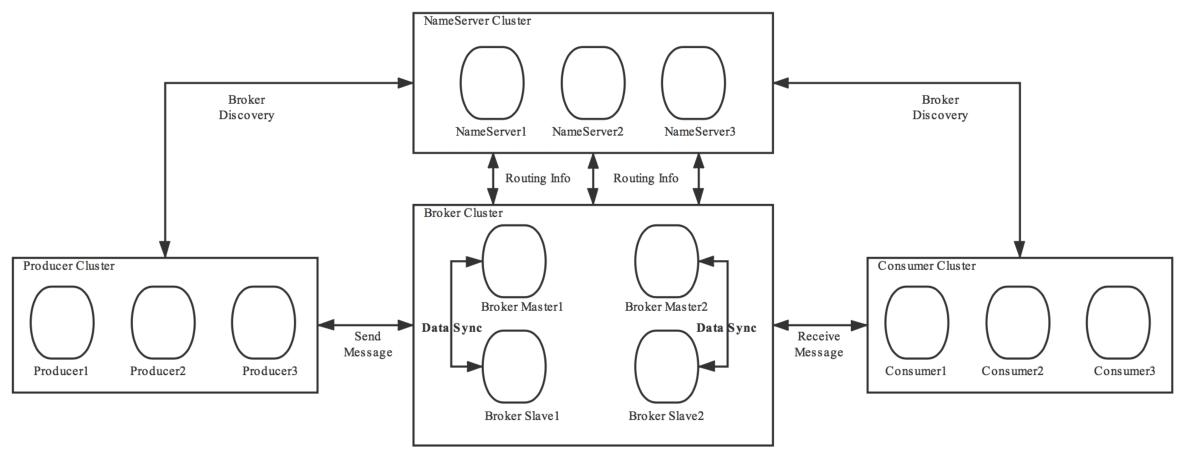
为了增强Broker性能与吞吐量,Broker一般都是以集群形式出现的。各集群节点中可能存放着相同Topic的不同Queue。不过,这里有个问题,如果某Broker节点宕机,如何保证数据不丢失呢?其解决方案是,将每个Broker集群节点进行横向扩展,即将Broker节点再建为一个HA集群,解决单点问题。
Broker节点集群是一个主从集群,即集群中具有Master与Slave两种角色。Master负责处理读写操作请求,Slave负责对Master中的数据进行备份。当Master挂掉了,Slave则会自动切换为Master去工作。所以这个Broker集群是主备集群。一个Master可以包含多个Slave,但一个Slave只能隶属于一个Master。Master与Slave的对应关系是通过指定相同的BrokerName、不同的BrokerId来确定的。BrokerId为0表示Master,非0表示Slave。每个Broker与NameServer集群中的所有节点建立长连接,定时注册Topic信息到所有NameServer。
主从集群:主机和从机都在工作
主备集群:主机在工作,当主机挂掉了,备用机变成主机工作
5、工作流程
具体流程:
- 启动NameServer,NameServer启动后开始监听端口,等待Broker、Producer、Consumer连接。
- 启动Broker时,Broker会与所有的NameServer建立并保持长连接,然后每30秒向NameServer定时发送心跳包。
- 发送消息前,可以先创建Topic,创建Topic时需要指定该Topic要存储在哪些Broker上,当然,在创建Topic时也会将Topic与Broker的关系写入到NameServer中。不过,这步是可选的,也可以在发送消息时自动创建Topic。
- Producer发送消息,启动时先跟NameServer集群中的其中一台建立长连接,并从NameServer中获取路由信息,即当前发送的Topic消息的Queue与Broker的地址(IP+Port)的映射关系。然后根据算法策略从队选择一个Queue,与队列所在的Broker建立长连接从而向Broker发消息。当然,在获取到路由信息后,Producer会首先将路由信息缓存到本地,再每30秒从NameServer更新一次路由信息。
- Consumer跟Producer类似,跟其中一台NameServer建立长连接,获取其所订阅Topic的路由信息,然后根据算法策略从路由信息中获取到其所要消费的Queue,然后直接跟Broker建立长连接,开始消费其中的消息。Consumer在获取到路由信息后,同样也会每30秒从NameServer更新一次路由信息。不过不同于Producer的是,Consumer还会向Broker发送心跳,以确保Broker的存活状态。
Topic的创建模式
手动创建Topic有两种模式:
- 集群模式:该模式下创建的Topic在该集群中,所有Broker中的Queue数量是相同的。
- Broker模式:该模式下创建的Topic在该集群中,每个Broker中的Queue数量可以不同。
自动创建Topic时,默认采用的是Broker模式,会为每个Broker默认创建4个Queue。
读/写队列
从物理上来讲,读/写队列是同一个队列。所以,不存在读/写队列数据同步问题。读/写队列是逻辑上进行区分的概念。一般情况下,读/写队列数量是相同的。
例如,创建Topic时设置的写队列数量为8,读队列数量为4,此时系统会创建8个Queue,分别是0、1、2、3、4、5、6、7。Producer会将消息写入到这8个队列,但Consumer只会消费0、1、2、3这4个队列中的消息,4、5、6、7中的消息是不会被消费到的。
再如,创建Topic时设置的写队列数量为4,读队列数量为8,此时系统会创建8个Queue,分别是0、1、2、3、4、5、6、7。Producer会将消息写入到0、1、2、3这4个队列,但Consumer只会消费0、1、2、3、4、5、6、7这8个队列中的消息,但是4、5、6、7中是没有消息的。此时假设ConsumerGroup中包含两个Consuer,Consumer1消费0、1、2、3,而Consumer2消费4、5、6、7。但实际情况是,Consumer2是没有消息可消费的。
也就是说,当读/写队列数量设置不同时,总是有问题的。那么,为什么要这样设计呢?
其这样设计的目的是为了,方便Topic的Queue的缩容。
例如,原来创建的Topic中包含16个Queue,如何能够使其Queue缩容为8个,还不会丢失消息?
可以动态修改写队列数量为8,读队列数量不变。此时新的消息只能写入到前8个队列,而消费者消费的却是16个队列中的数据。当发现后8个Queue中的消息消费完毕后,就可以再将读队列数量动态设置为8。整个缩容过程,没有丢失任何消息。
谁多就创建谁!
举例:
- 读队列5,写队列是3,此时系统会创建5个Queue
- 读队列是3,写队列是8,此时系统也会创建8个Queue
perm用于设置对当前创建Topic的操作权限:2表示只写,4表示只读,6表示读写。
三、单机安装与启动
1、准备工作
软硬件需求
- 系统要求:64位操作系统(推荐Linux/Unix/Mac,Windows用户需参考对应指南)。
- JDK要求:64位JDK1.8及以上版本。
- 其他:Maven3.2.x、Git,Broker服务器需4g以上空闲磁盘。

下载RocketMQ安装包


将下载的安装包上传到Linux
解压
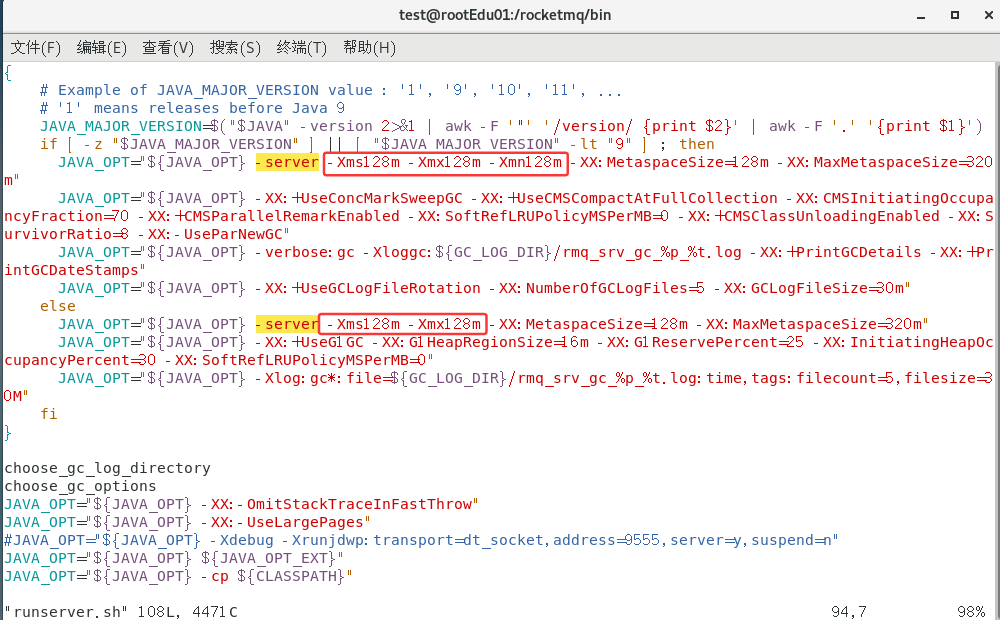
2、修改初始内存
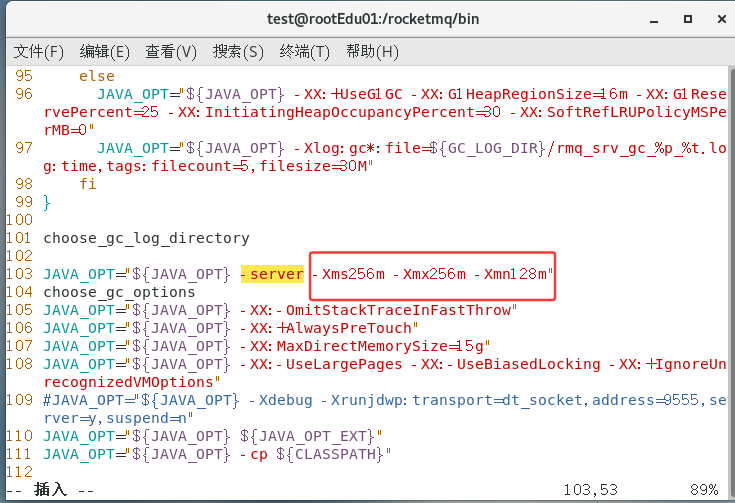
修改runserver.sh
进入到RocketMQ文件夹下,使用vim命令打开bin/runserver.sh文件,如果不修改的话占用内存过大,建议修改。现将这些值修改为如下:
修改runbroker.sh
进入到RocketMQ文件夹下,使用vim命令打开bin/runbroker.sh文件,如果不修改默认占8G:
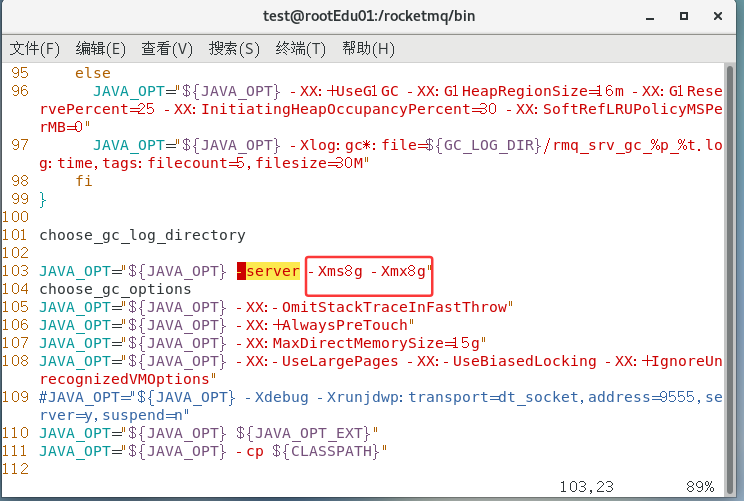
现将这些值修改为如下:
3、启动
启动NameServer
启动NameServer进入bin目录下
## 启动namesrv |
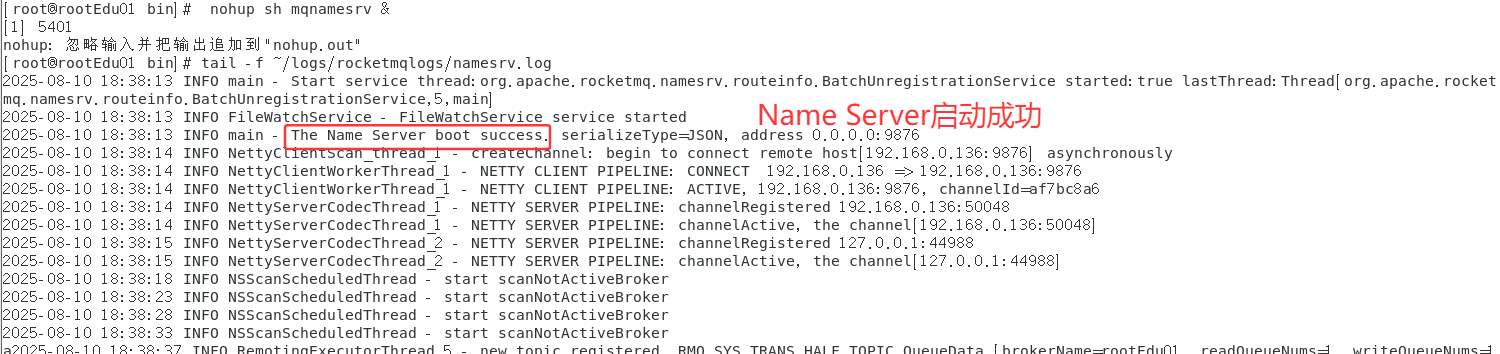
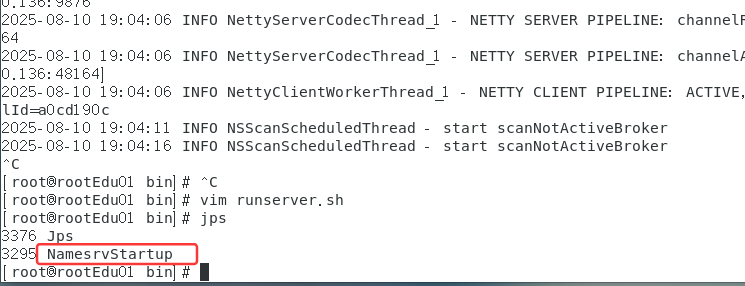
可以通过jps看到
启动broker
## 先启动broker |
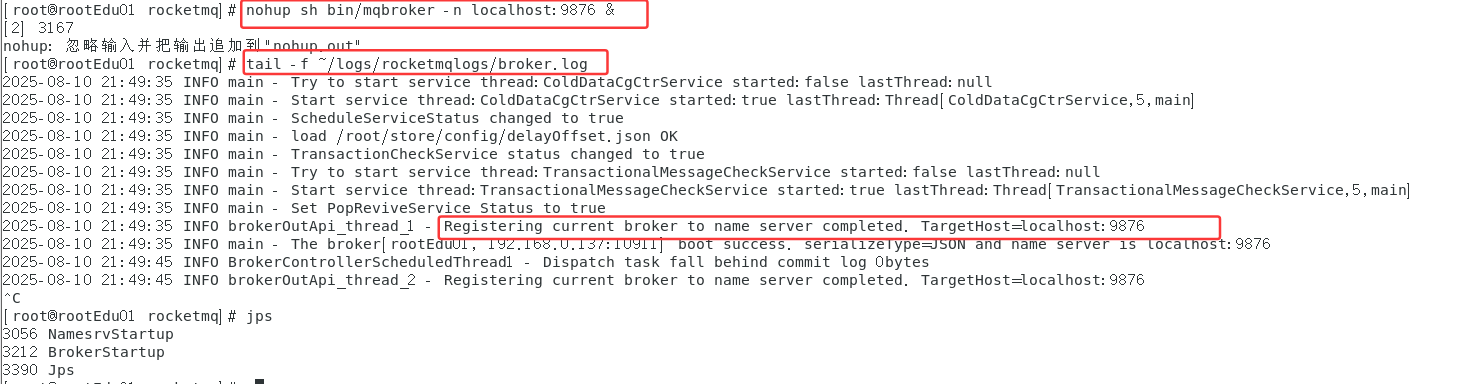
一定要在rocketmq目录下输入命令,不然启动不了!具体请参考rocketmq官网:https://rocketmq.apache.org/zh/docs/deploymentOperations/01deploy 方式部署
停止
停止nameserver
sh bin/mqshutdown namesrv |
停止broker
sh bin/mqshutdown broker |
4、发送/接受消息测试
发送消息
在进行工具测试消息收发之前,我们需要告诉客户端NameServer的地址,RocketMQ有多种方式在客户端中设置NameServer地址,这里我们利用环境变量NAMESRV_ADDR
export NAMESRV_ADDR=localhost:9876 # 默认rocketmq端口号为9876 |
接受消息
sh bin/tools.sh org.apache.rocketmq.example.quickstart.Consumer |

一定要在rocketmq目录下输入命令,不然发送/接受消息不了!
发送/接受消息如果报错了,试试关闭防火墙,或者让防火墙开放 MQ 相关的端口
开放name server默认端口 |
5、关闭Server
无论是关闭nameserver还是broker,都是使用bin/mqshutdown命令。
sh bin/mqshutdown broker # 关闭broker |
或者进入到bin目录下
sh mqshutdown broker # 关闭broker |
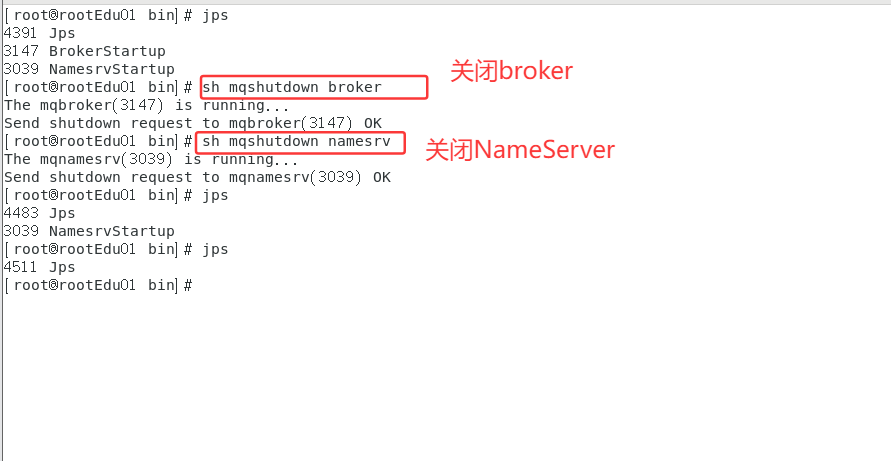
要先关闭
broker在关闭NameServer
四、控制台的安装与启动
RocketMQ有一个可视化的dashboard,通过该控制台可以直观的查看到很多数据。
1、下载
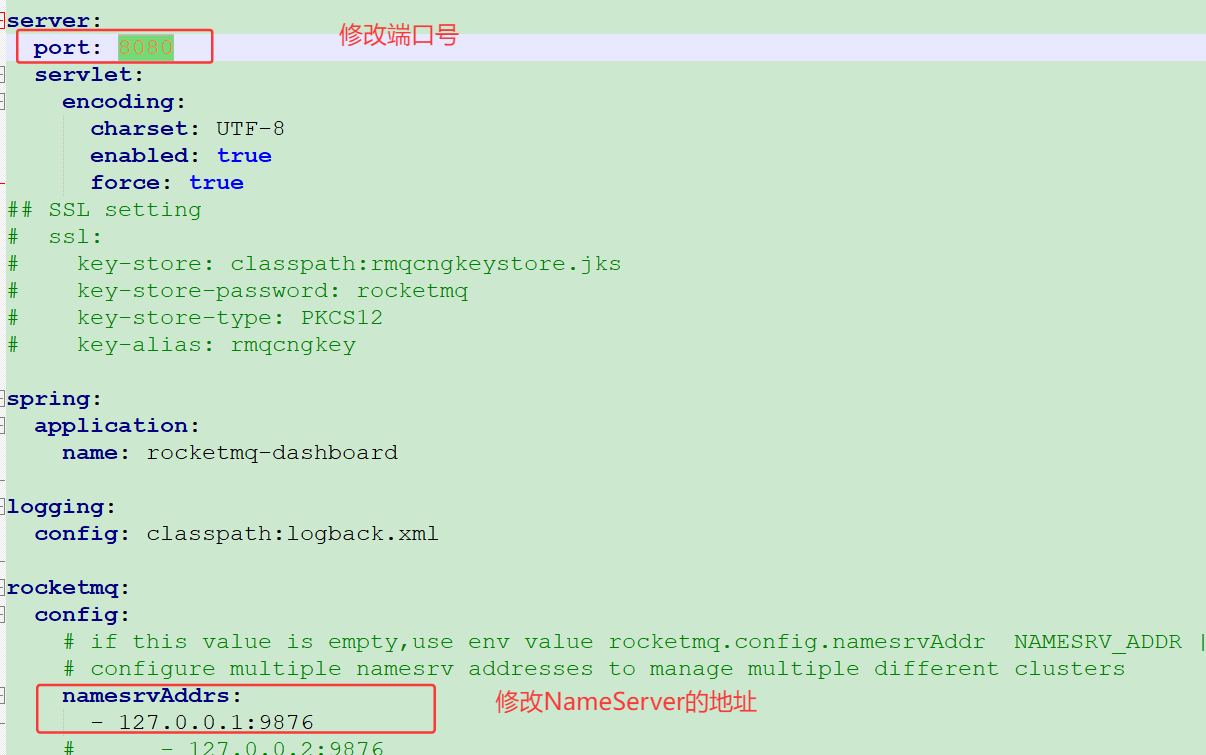
2、修改配置
RocketMQ可视化dashboard是个SpringBoot项目
修改其src/main/resources中的application.properties配置文件。
- 原来的端口号为8080,修改为一个不常用的
- 指定RocketMQ的nameserver地址
3、打包
进行打包
mvn clean package |
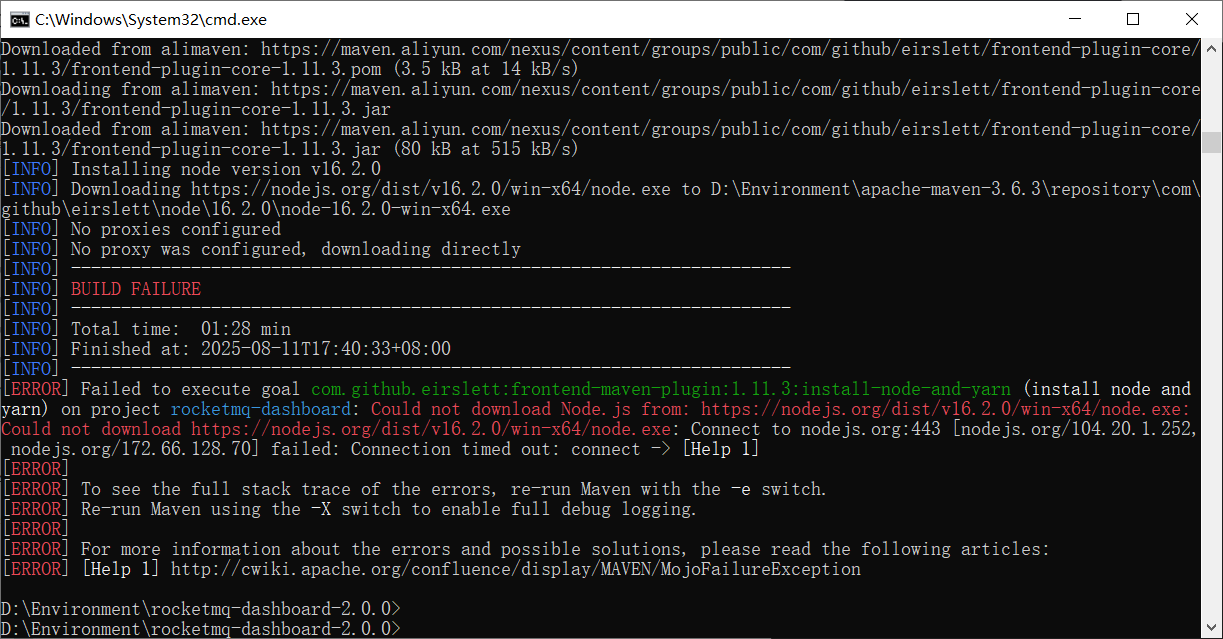
如果出现上述结果我们,跳过测试
mvn clean package -D maven.test.skip=true |
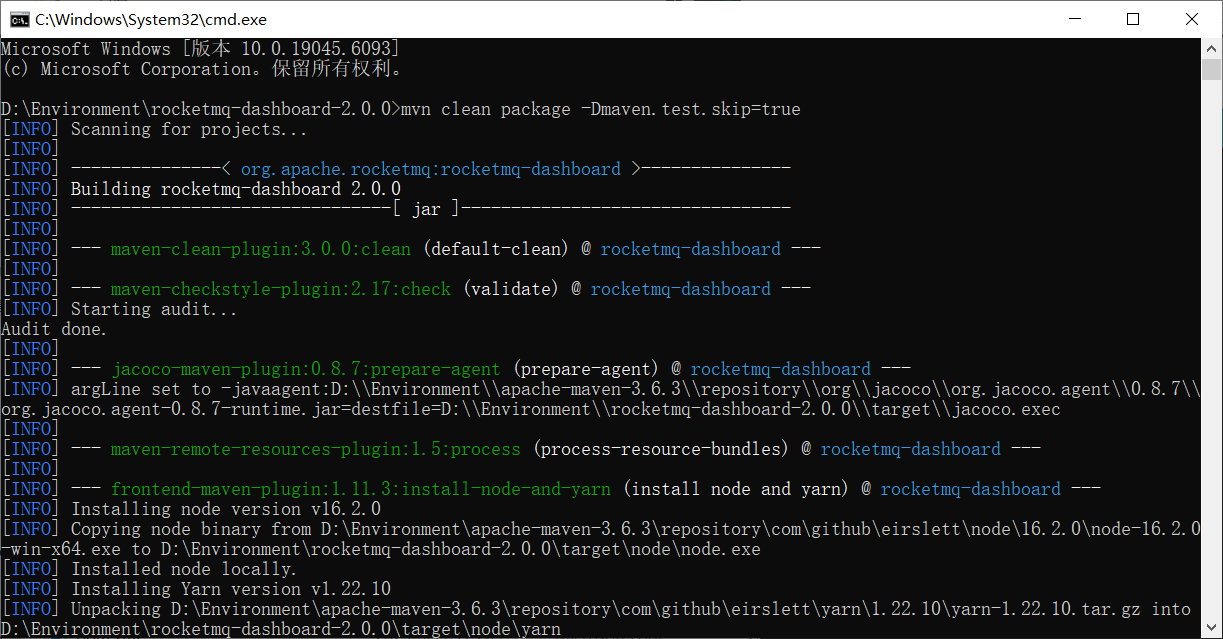
打包成功!
4、启动
启动rocketmq-dashboard-2.0.0.jar
java -jar rocketmq-dashboard-2.0.0.jar |
5、访问
启动成功后我们配置的端口号是4005,我们输入 http://localhost:4005 进行访问
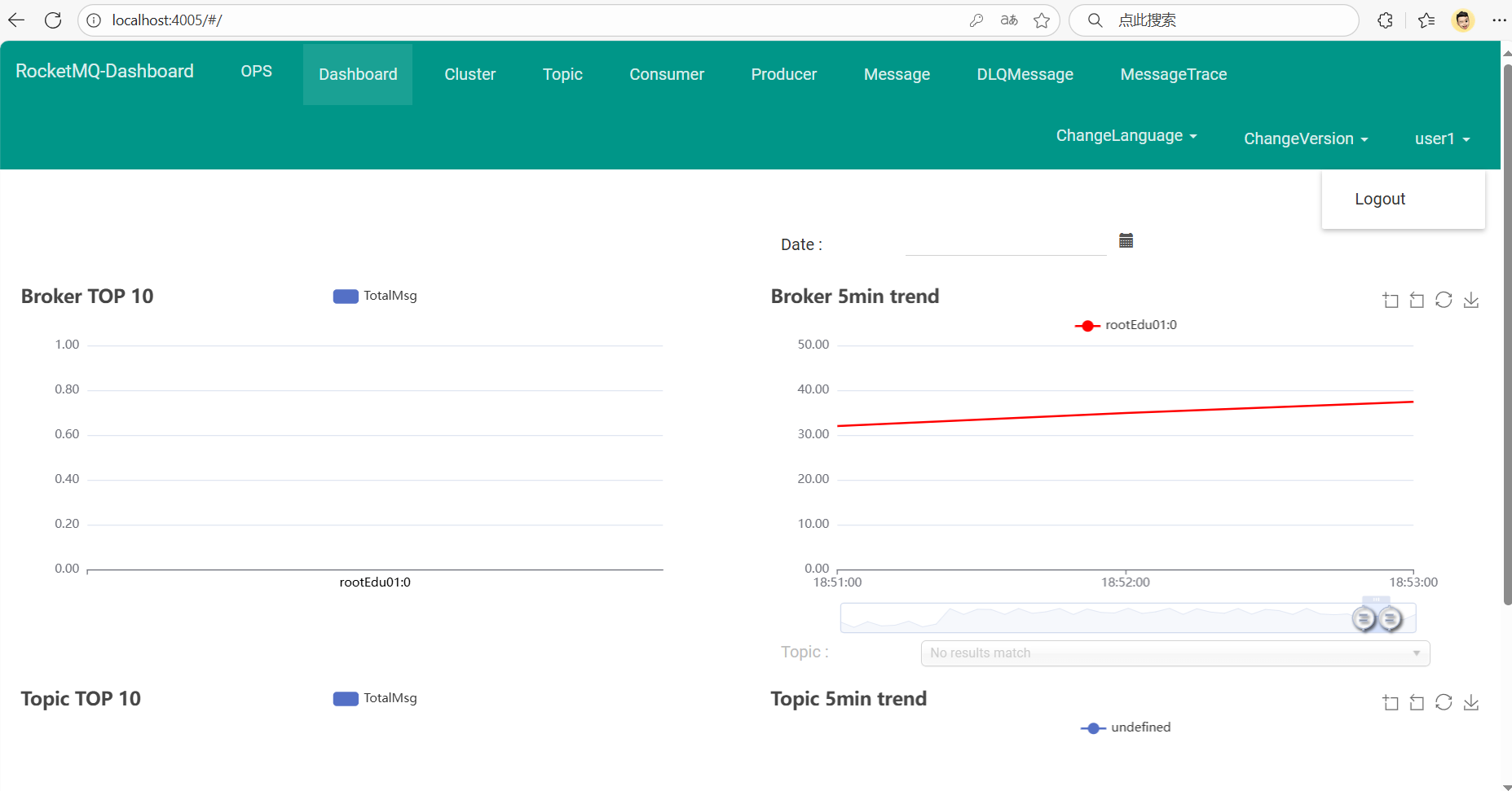
具体介绍,设置Dashboard账号密码,请访问 https://github.com/apache/rocketmq-dashboard/blob/master/docs/1_0_0/UserGuide_CN.md
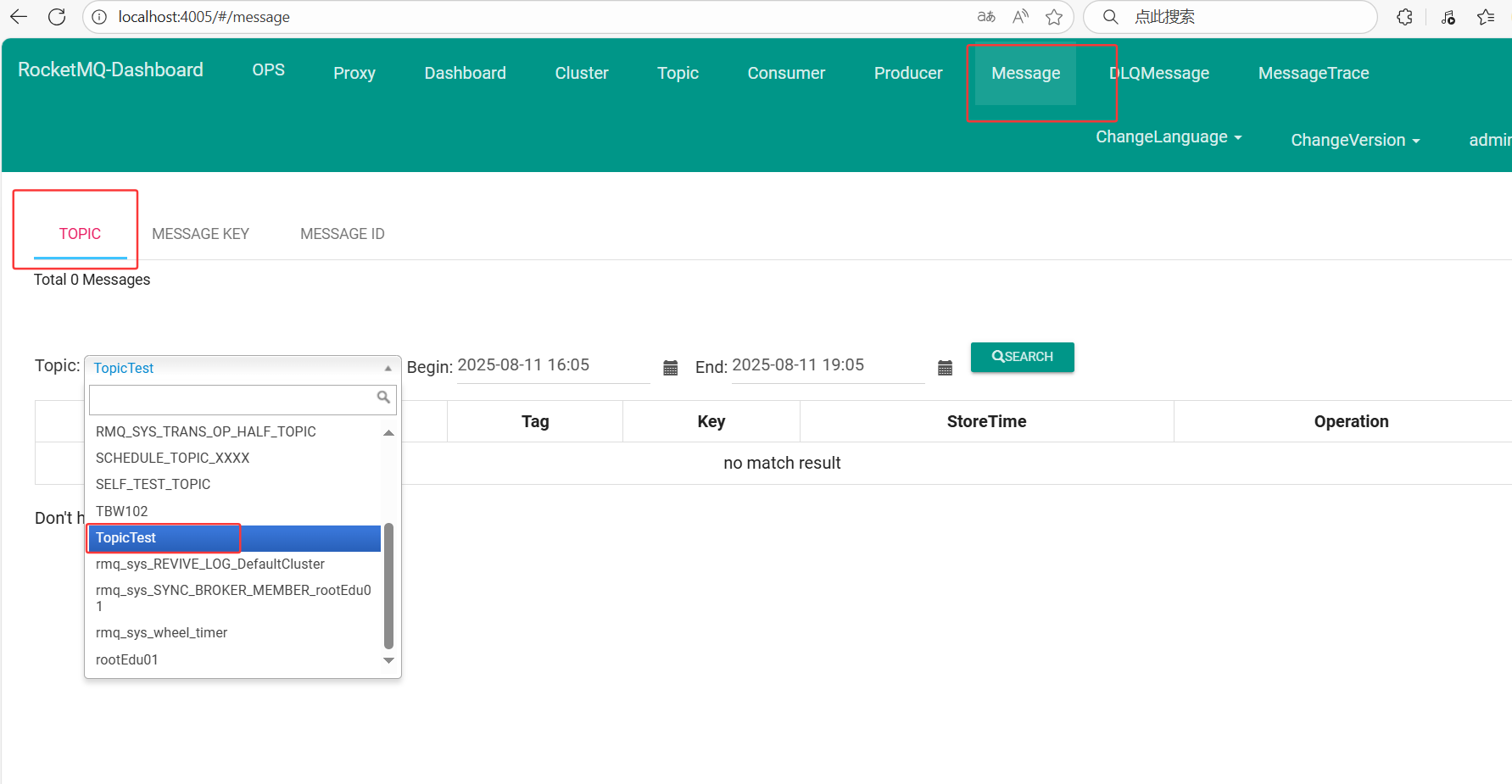
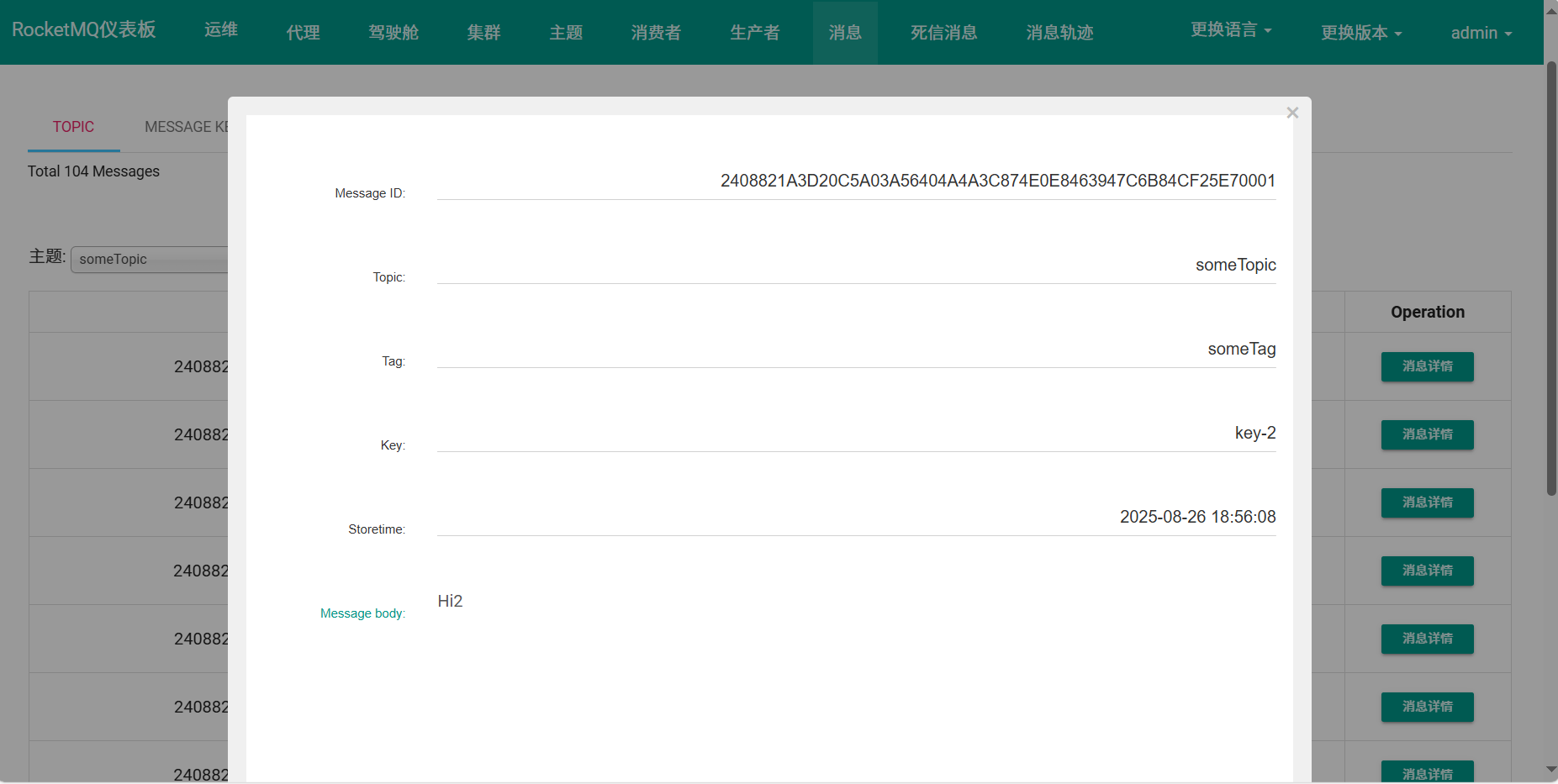
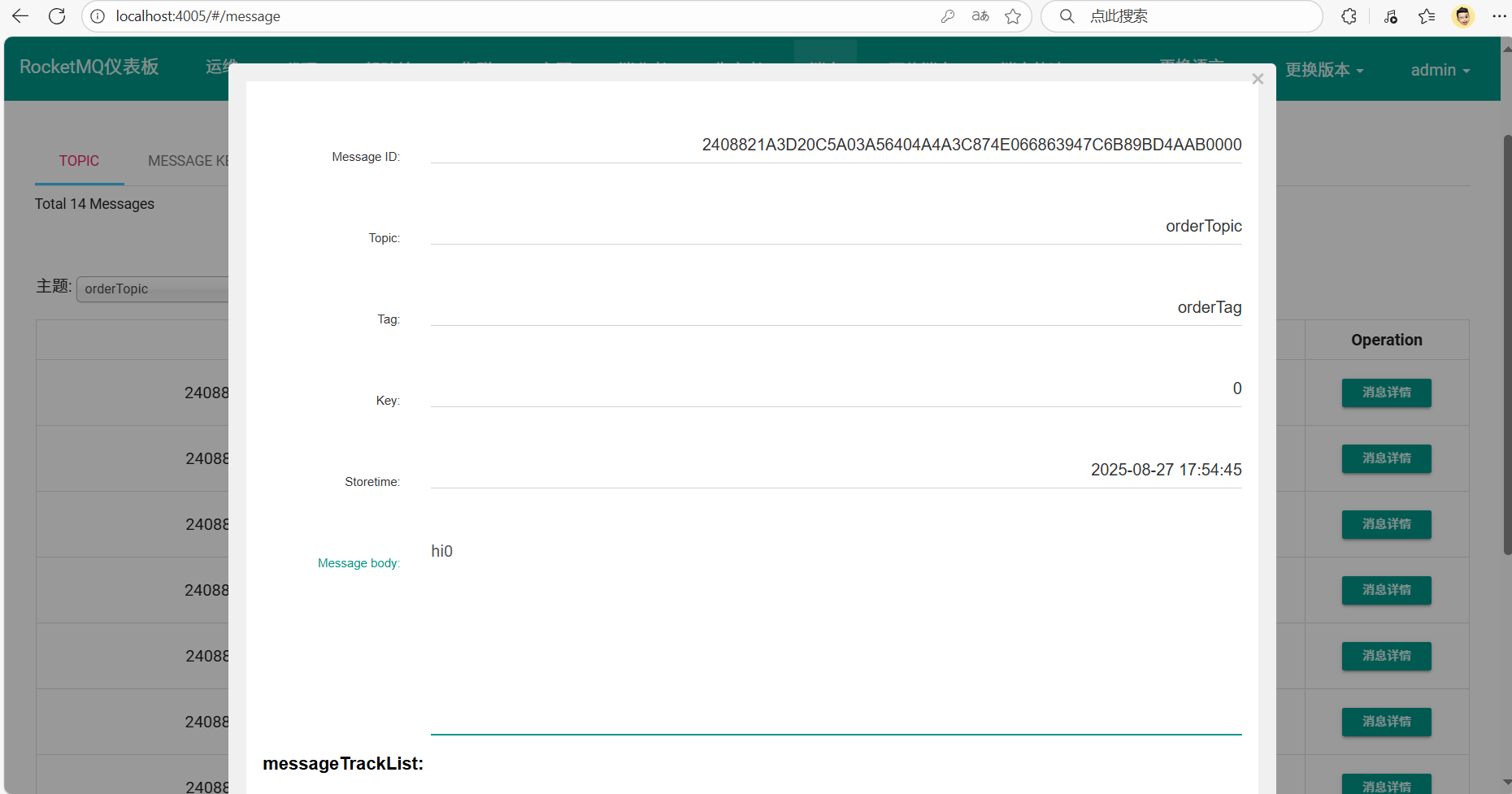
启动成功了,我们先发条消息看看
我们打开页面点击message选项选择TopicTest,再点击search
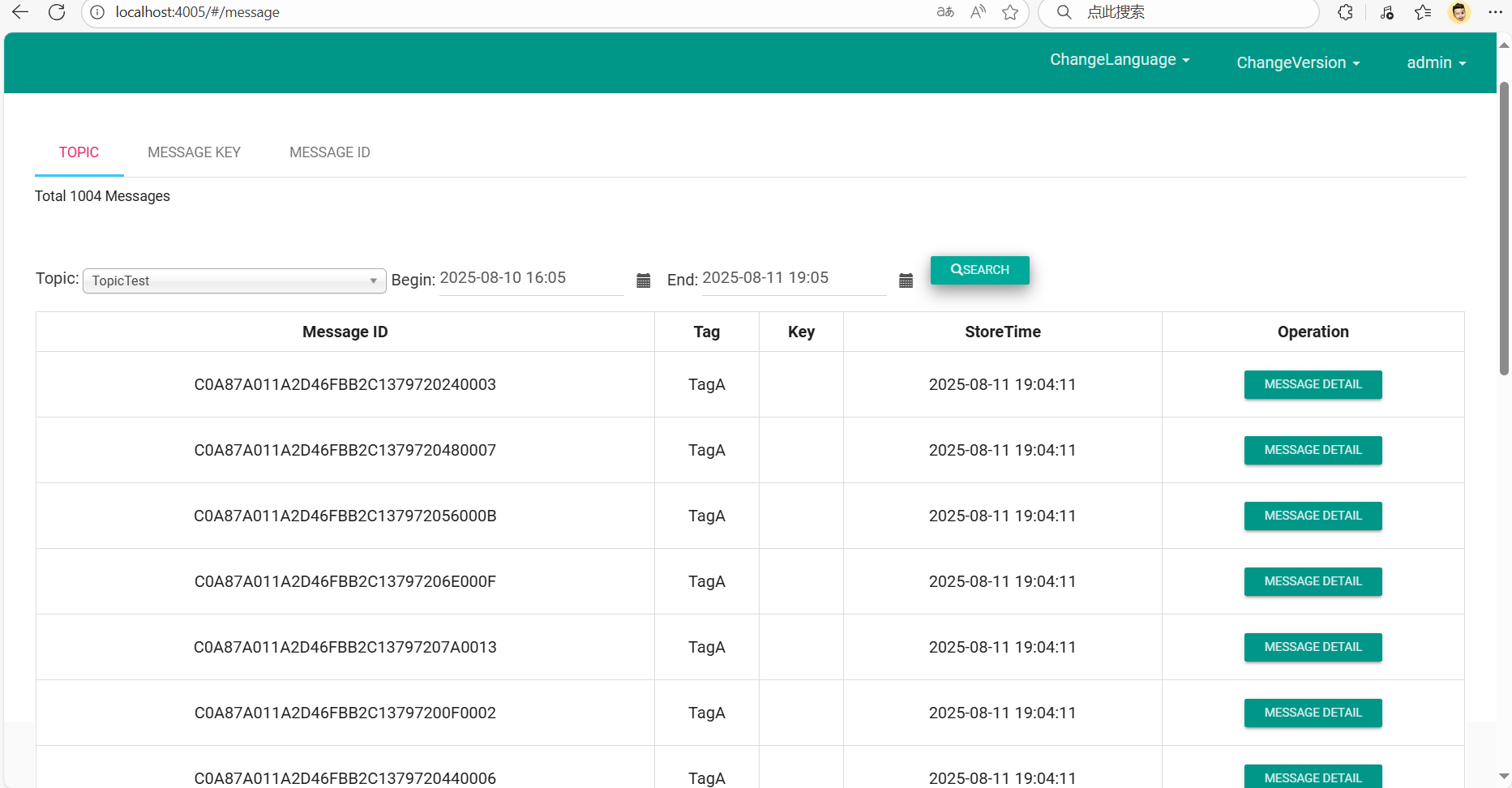
我们点击message detail

五、集群搭建理论
1、数据复制与刷盘策略
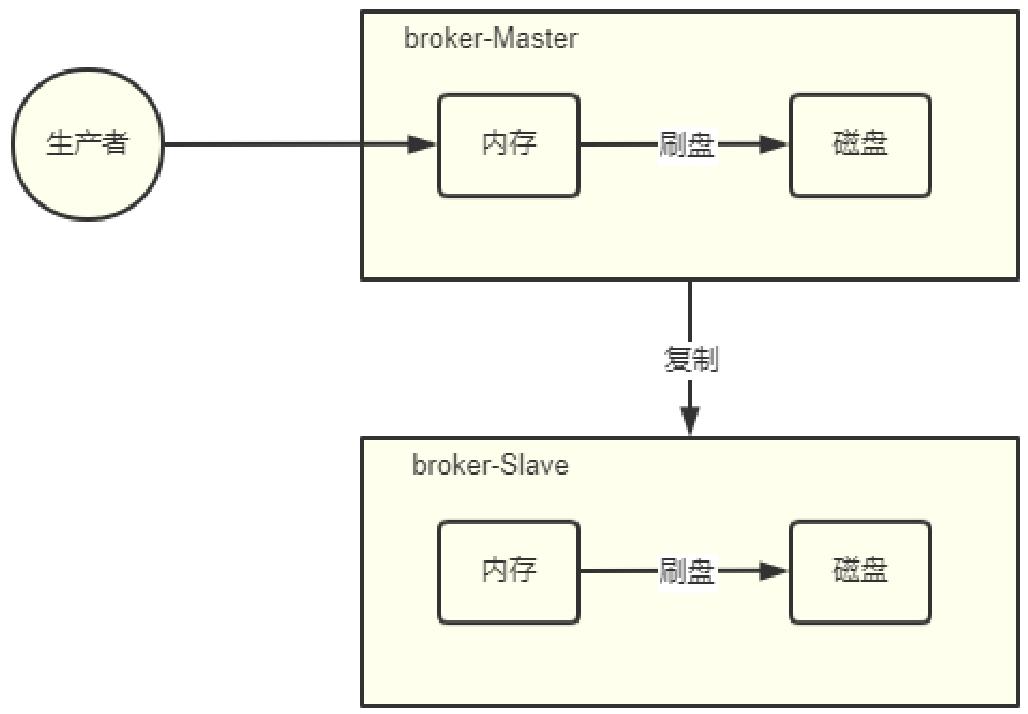
复制策略
复制策略是Broker的Master与Slave间的数据同步方式。分为同步复制与异步复制:
同步复制:消息写入master后,master会等待slave同步数据成功后才向producer返回成功ACK
异步复制:消息写入master后,master立即向producer返回成功ACK,无需等待slave同步数据成功
异步复制策略会降低系统的写入延迟,RT(response time)变小,提高了系统的吞吐量
刷盘策略
什么是 PageCache (操作系统层面)?
PageCache 指的是 Linux 操作系统的内核特性,而不是 RocketMQ 自身实现的某个组件。理解 PageCache 对于掌握 RocketMQ 高性能的关键(尤其是顺序读写)至关重要。
- 目的: 它是 Linux 内核用来缓存磁盘文件数据到内存的主要机制。其核心目标是减少直接磁盘 I/O 的次数,从而显著提升文件系统的访问性能。
- 工作原理:
- 写入时: 当应用程序(如 RocketMQ Broker)调用
write()系统调用向磁盘文件写入数据时,数据并不会立即被物理写入硬盘。 - 写入 PageCache: 数据首先被复制到内核空间的内存区域中,这块内存就是 PageCache。
- 延迟写回: 内核会在合适的时机(例如 PageCache 空间不足、特定时间间隔、或者应用程序显式调用
fsync()/fdatasync())将脏页异步地刷新到底层物理磁盘。 - 读取时: 当应用程序调用
read()读取文件数据时:- 内核首先检查请求的数据是否已经在 PageCache 中。
- 如果命中,数据会直接从内存(PageCache) 拷贝到用户空间缓冲区,无需访问慢速的磁盘,速度极快。
- 如果未命中,内核会发起真正的磁盘 I/O 操作,将所需数据块从磁盘读入 PageCache,然后再拷贝给应用程序。同时,内核通常会利用预读策略将文件后续的多个数据块也读入 PageCache,优化后续顺序读取的性能。
- 写入时: 当应用程序(如 RocketMQ Broker)调用
- 单位: 缓存的基本单位是内存页(通常是 4KB)。
- 好处:
- 写加速: 应用程序的
write()操作在数据进入 PageCache 后就立即返回,速度非常快。实际的磁盘写入由内核异步完成。 - 读加速: 对频繁访问或最近访问过的文件数据,后续读取可以直接从内存获取,速度比磁盘快几个数量级。
- 减少磁盘 I/O: 合并多次小写入、利用预读减少随机读的磁盘寻道次数。
- 写加速: 应用程序的
PageCache 如何作用于 RocketMQ?
RocketMQ 巧妙地利用了 Linux PageCache 的特性来实现其高性能的消息持久化和消费:
- 消息写入(Producer -> Broker):
- 生产者发送的消息到达 Broker。
- Broker 将消息顺序追加写入到
CommitLog文件(RocketMQ 的核心存储文件,所有消息都按顺序写到这里)。 - 这个
write()操作首先进入 PageCache。对于配置为异步刷盘模式的 Broker,此时写入操作即可认为完成(消息已“持久化”到内存),并立即返回 ACK 给生产者,速度极快。真正的磁盘刷盘由操作系统内核异步调度。 - 如果是同步刷盘模式,Broker 在写入 PageCache 后,会立即调用
fsync()或fdatasync(),强制要求内核将包含这条消息的 PageCache 脏页立即刷写到物理磁盘,然后才返回 ACK。这个过程涉及真正的磁盘 I/O,速度比异步刷盘慢得多,但能保证即使机器掉电消息也不会丢失。
- 消息读取(Broker -> Consumer):
- 消费者发起拉取消息请求。
- Broker 需要从
CommitLog文件(以及ConsumerQueue索引文件)中读取消息内容。 - 关键点: 由于消息是顺序写入
CommitLog的,消费者的消费通常也是顺序的(或者接近顺序的)。 - PageCache 命中: 当 Broker 尝试读取
CommitLog文件时:- 如果目标数据块正好在 PageCache 中(因为之前写入操作刚进来不久,或者被预读机制加载了),那么读取操作直接从内存完成,速度非常快(接近内存速度)。
- 由于
CommitLog是超大文件且顺序读写,内核的预读机制会非常高效。当消费者读取当前消息时,内核很可能已经提前将后续的多个消息数据块预读到了 PageCache 中。这使得后续的消息读取几乎都能命中 PageCache。
- PageCache 未命中: 如果数据不在 PageCache(例如消息是很久以前写入的,且已被挤出缓存),Broker 则需要进行实际的磁盘 I/O 读取,速度会显著下降。
PageCache 对 RocketMQ 性能的关键意义
- 写性能: 异步刷盘模式下,消息写入的性能瓶颈几乎完全取决于写入 PageCache 的速度(接近内存速度),远高于直接写磁盘的速度。这使得 RocketMQ 能轻松应对高吞吐的生产场景。
- 读性能: 对于顺序消费(这是最常见场景),得益于 PageCache 的高命中率和内核预读,消息读取的性能也主要取决于从 PageCache 拷贝数据的速度(接近内存速度),同样远高于磁盘读取速度。这是 RocketMQ 消费速度快的关键。
- “内存速度的磁盘读写”错觉: PageCache 让 RocketMQ 看起来像是在“操作内存”,但其背后依赖的是磁盘提供的持久化能力。它巧妙地用内存弥补了磁盘的慢速。
- 减少磁盘压力: 合并写操作、顺序读的预读,都大大减少了实际发生的磁盘 I/O 次数和寻道时间,提升了磁盘利用率和系统整体吞吐量。
总结
简单来说,RocketMQ 中的 PageCache 就是指 Linux 内核用于缓存磁盘文件数据的内存区域。RocketMQ 通过:
- 将消息顺序追加写入
CommitLog文件(数据先落 PageCache)。 - 利用 异步刷盘 策略最大化写入吞吐(依赖 PageCache 的延迟写特性)。
- 利用消费者通常是顺序读取
CommitLog的特性,结合内核预读机制,使后续读取请求高概率命中 PageCache。
从而实现了接近内存访问速度的高性能消息持久化和消费。理解 PageCache 是理解 RocketMQ 高性能存储机制的核心。
TransientStorePoolEnable是指RocketMQ中的一个配置选项,用于引入内存级别的读写分离机制,从而降低PageCache的压力并提高系统性能。具体来说:
- 内存读写分离机制:在默认情况下,RocketMQ的消息会写入pagecache,然后在消费时从pagecache中读取。这种模式在高并发场景下可能导致pagecache压力过大,进而出现broker busy的情况。通过开启TransientStorePoolEnable,RocketMQ会将消息先写入堆外内存(DirectByteBuffer),然后异步地将堆外内存中的数据提交到pagecache,最后再异步刷盘到磁盘。
- 减少pagecache压力:由于消息先写入堆外内存,这减轻了pagecache的直接压力,因为pagecache不需要立即处理每条消息的写入操作。这样,pagecache可以专注于处理其他请求,避免了在高并发时的锁等待问题。
- 提高性能:通过这种方式,消息写入操作被批量化处理,减少了对pagecache的频繁访问,从而降低了写入响应延迟,提高了系统的整体性能。
- 风险与权衡:虽然TransientStorePoolEnable带来了性能上的提升,但同时也引入了新的风险。如果Broker进程异常退出,存储在堆外内存的数据可能会丢失,因为这些数据尚未刷盘到磁盘。因此,在高可用场景下,需要权衡性能提升和数据丢失的风险。
什么是落盘?
- 具体存储到commitLog时有不同的策略:通常消息先写到mmap内存(mappedFIle)里,是否同步刷盘看配置。broker存在刷盘线程,同步异步就是看你发送的刷盘任务是同步还是异步,其中异步刷盘还存在两种形式:一种就是传统方式,把数据写到pageCache,然后异步fsync到磁盘文件,另一种就是
TransientStorePoolEnable模式,数据先写到mmap中(直接内存DM),并开启内存锁定确保不会置换到虚拟内存,然后异步刷到pageCache,再异步刷到disk上,因为broker读写都走pageCache,高并发可能出现broker buzy,所以引入这种方式降低了pageCache的压力,读消息也可以直接从DM中拿,很多人把这个叫做RocketMQ的“内存读写分离”机制。
刷盘策略指的是broker中消息的落盘方式,即消息发送到broker内存后消息持久化到磁盘的方式。分为同步刷盘与异步刷盘:
同步刷盘:当消息持久化到broker的磁盘后才算是消息写入成功。
异步刷盘:当消息写入到broker的内存后即表示消息写入成功,无需等待消息持久化到磁盘。
异步刷盘策略会降低系统的写入延迟,RT变小,提高了系统的吞吐量
消息写入到Broker的内存,一般是写入到了PageCache(是针对文件系统的缓存)
对于异步刷盘策略,消息会写入到PageCache后立即返回成功ACK。但并不会立即做落盘操作,而是当PageCache到达一定量时会自动进行落盘。
ACK机制:
RocketMQ的ACK机制是确保消息被正确消费的重要机制。当消费者通过回调函数返回
ConsumeConcurrentlyStatus.CONSUME_SUCCESS时,RocketMQ认为消息消费成功;否则,消息会被重试并可能进入死信队列。
追求效率就用异步刷盘,追求可靠性就用同步刷盘,异步刷盘有可能会丢失消息,概率极低,但是效率快,同步刷盘不会丢失消息,但是效率比异步刷盘慢!
2、Broker集群模式
官网:https://github.com/apache/rocketmq/blob/master/docs/cn/operation.md
根据Broker集群中各个节点间关系的不同,Broker集群可以分为以下几类:
单Master
只有一个broker(其本质上就不能称为集群)。这种方式也只能是在测试时使用,生产环境下不能使用,因为存在单点问题。
这种方式风险较大,一旦Broker重启或者宕机时,会导致整个服务不可用。不建议线上环境使用,可以用于本地测试。
多Master
broker集群仅由多个master构成,不存在Slave。同一Topic的各个Queue会平均分布在各个master节点上。
一个集群无Slave,全是Master,例如2个Master或者3个Master,这种模式的优缺点如下:
优点:配置简单,单个Master宕机或重启维护对应用无影响,在磁盘配置为RAID10(一零,不是十)时,即使机器宕机不可恢复情况下,由于RAID10磁盘非常可靠,消息也不会丢(异步刷盘丢失少量消息,同步刷盘一条不丢),性能最高;
缺点:单台机器宕机期间,这台机器上未被消费的消息在机器恢复之前不可订阅(不可消费),消息实时性会受到影响。
以上优点的前提是,这些Master都配置了RAID磁盘阵列。如果没有配置,一旦出现某Master宕机,则会发生大量消息丢失的情况。
多Master多Slave模式-异步复制
每个Master配置一个Slave,有多对Master-Slave,HA采用异步复制方式,主备有短暂消息延迟(毫秒级),这种模式的优缺点如下:
- 优点:即使磁盘损坏,消息丢失的非常少,且消息实时性不会受影响,同时Master宕机后,消费者仍然可以从Slave消费,而且此过程对应用透明,不需要人工干预,性能同多Master模式几乎一样;
- 缺点:Master宕机,磁盘损坏情况下会丢失少量消息。
broker集群由多个master构成,每个master又配置了多个slave(在配置了RAID磁盘阵列的情况下,一个master一般配置一个slave即可)。master与slave的关系是主备关系,即master负责处理消息的读写请求,而slave仅负责消息的备份与master宕机后的角色切换。
异步复制即前面所讲的复制策略中的异步复制策略,即消息写入master成功后,master立即向producer返回成功ACK,无需等待slave同步数据成功。
该模式的最大特点之一是,当master宕机后slave能够自动切换为master。不过由于slave从master的同步具有短暂的延迟(毫秒级),所以当master宕机后,这种异步复制方式可能会存在少量消息的丢失问题。
Slave从Master同步的延迟越短,其可能丢失的消息就越少
对于Master的RAID磁盘阵列,若使用的也是异步复制策略,同样也存在延迟问题,同样也可能会丢失消息。但RAID阵列的秘诀是微秒级的(因为是由硬件支持的),所以其丢失的数据量会更少
多Master多Slave模式-同步双写
每个Master配置一个Slave,有多对Master-Slave,HA采用同步双写方式,即只有主备都写成功,才向应用返回成功,这种模式的优缺点如下:
- 优点:数据与服务都无单点故障,Master宕机情况下,消息无延迟,服务可用性与数据可用性都非常高;
- 缺点:性能比异步复制模式略低(大约低10%左右),发送单个消息的RT会略高,且目前版本在主节点宕机后,备机不能自动切换为主机。
该模式是多Master多Slave模式的同步复制实现。所谓同步双写,指的是消息写入master成功后,master会等待slave同步数据成功后才向producer返回成功ACK,即master与slave都要写入成功后才会返回成功ACK,也即双写。
该模式与异步复制模式相比,优点是消息的安全性更高,不存在消息丢失的情况。但单个消息的RT略高,从而导致性能要略低(大约低10%)。
该模式存在一个大的问题:对于目前的版本,Master宕机后,Slave不会自动切换到Master。
RocketMQ 5.0 自动主从切换
官网:https://github.com/apache/rocketmq/blob/master/docs/cn/controller/design.md
参考文档:https://jishuzhan.net/article/1713730087322390529
在RocketMQ 5.0以前,有两种集群部署模式,分别为主从模式(Master-Slave模式)和Dledger模式。
背景
- 主从模式
主从模式中分为Master和Slave两个角色,集群中可以有多个Master节点,一个Master节点可以有多个Slave节点。Master节点负责接收生产者发送的写入请求,将消息写CommitLog文件,Slave节点会与Master节点建立连接,从Master节点同步消息数据(有同步复制和异步复制两种方式)。
消费者可以从Master节点拉取消息,也可以从Slave节点拉取消息。
在RocketMQ 4.5版 本之前,如果Master宕机,不支持自动将Slave切换为Master,需要人工介入。
- Dledger模式
为了解决主从架构下Slave不能自动切换为Master的问题,4.5版本之后提供了DLedger模式,使用Raft算法,如果Master节点出现故障,可以自动从Slave节点中选举出新的Master进行切换。
当前 RocketMQ Raft 模式主要是利用 DLedger Commitlog 替换原来的 Commitlog,使 Commitlog 拥有选举复制能力,但这也造成了一些问题:
- Raft 模式下,Broker组内副本数必须是三副本及以上,副本的ACK也必须遵循多数派协议。
- RocketMQ 存在两套 HA 复制流程,且 Raft 模式下的复制无法利用 RocketMQ 原生的存储能力。
- 根据Raft算法的多数原则,集群至少有三个节点以上,在消息写入时,也需要大多数的Follower节点响应成功才能认为消息写入成功;
- Dledger模式下,进行消息写入的时候,使用的是openmessaging包中提供的接口,无法利用RocketMQ原生的存储和复制能力(比如非Dledger模式下使用暂存池方式写入);
- 存在两套日志复制流程(主从模式下一套、Dledger模式下一套),不统一;
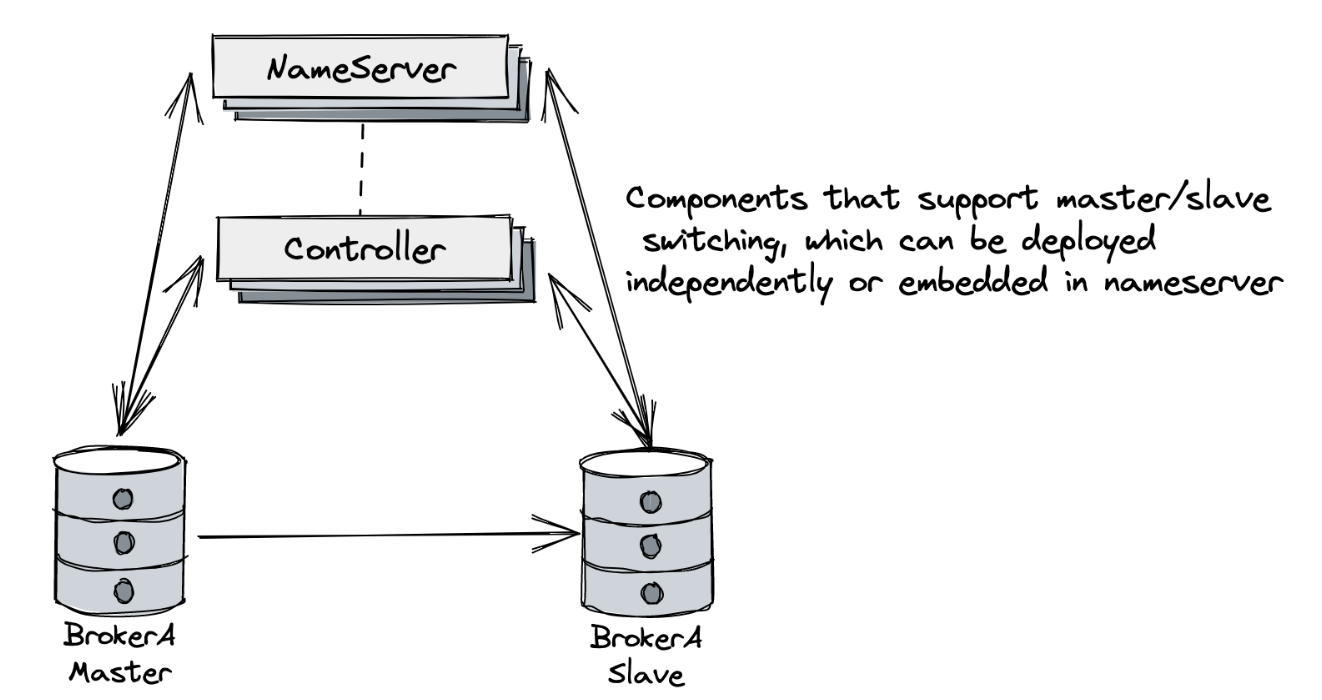
因此我们希望利用 DLedger 实现一个基于 Raft 的一致性模块(DLedger Controller),并当作一个可选的选主组件,支持独立部署,也可以嵌入在 Nameserver 中,Broker 通过与 Controller 的交互完成 Master 的选举,从而解决上述问题,我们将该新模式称为 Controller 模式。
设计思想
Controller
也称为Controller控制器,一般集群中部署多个Controller,使用Raft算法选举出一个Active DLedger Controller作为主控制器,它主要用来管理一个SyncStateSet集合,
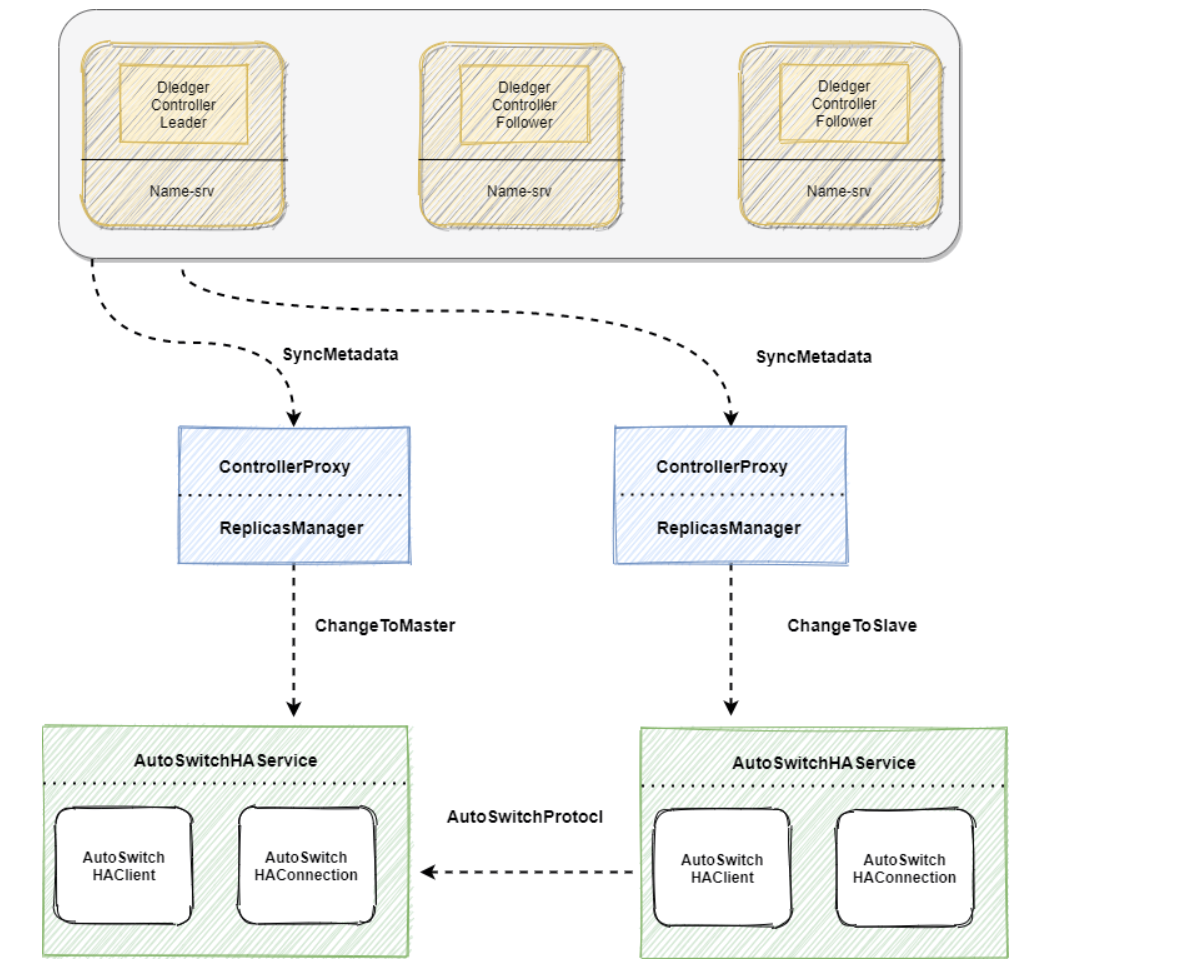
如图是 Controller 模式的核心架构,介绍如下:
- DledgerController:利⽤ DLedger ,构建⼀个保证元数据强⼀致性的 DLedger Controller 控制器,利⽤ Raft 选举会选出⼀个 Active DLedger Controller 作为主控制器,DLedger Controller 可以内嵌在 Nameserver中,也可以独立的部署。其主要作用是,用来存储和管理 Broker 的 SyncStateSet 列表,并在某个 Broker 的 Master Broker 下线或⽹络隔离时,主动发出调度指令来切换 Broker 的 Master。
- SyncStateSet:主要表示⼀个 broker 副本组中跟上 Master 的 Slave 副本加上 Master 的集合。主要判断标准是 Master 和 Slave 之间的差距。当 Master 下线时,我们会从 SyncStateSet 列表中选出新的 Master。 SyncStateSet 列表的变更主要由 Master Broker 发起。Master通过定时任务判断和同步过程中完成 SyncStateSet 的Shrink 和 Expand,并向选举组件 Controller 发起 Alter SyncStateSet 请求。
- AutoSwitchHAService:一个新的 HAService,在 DefaultHAService 的基础上,支持 BrokerRole 的切换,支持 Master 和 Slave 之间互相转换 (在 Controller 的控制下) 。此外,该 HAService 统一了日志复制流程,会在 HA HandShake 阶段进行日志的截断。
- ReplicasManager:作为一个中间组件,起到承上启下的作用。对上,可以定期同步来自 Controller 的控制指令,对下,可以定期监控 HAService 的状态,并在合适的时间修改 SyncStateSet。ReplicasManager 会定期同步 Controller 中关于该 Broker 的元数据,当 Controller 选举出一个新的 Master 的时候,ReplicasManager 能够感知到元数据的变化,并进行 BrokerRole 的切换。
SyncStateSet
SyncStateSet中维护了一个Broker副本组集合,包含当前Master Broker和它的Slave Broker,需要注意在集合内的节点都是跟上Master进度的节点,在节更变动时,由Master Broker向Controller控制器发起变更请求,更新Controller中的SyncStateSet数据,在选举Master的时候,Controller只需从这个列表中选出一个节点成为新的Master即可。
节点变更分为Shrink操作和Expand操作,需要Master Broker发起,它会通过定时任务以及在数据同步过程中判断是否需要进行Shrink或Expand。
Shrink
Shrink指的是将SyncStateSet副本集合中与Master节点差距过大的副本移除,差距的判断条件如下:
节点是否与Master Broker的连接已断,如果断开需要将该节点从SyncStateSet移除;
节点的复制进度是否过大,新增了haMaxTimeSlaveNotCatchup参数,Master Broker会通过定时任务扫描每一个Slave节点的复制信息,里面有每个节点上一次跟上Master进度的时间戳lastCaughtUpTimeMs,如果当前时间减去这个lastCaughtUpTimeMs超过了haMaxTimeSlaveNotCatchup的值,会认为该Slave节点的复制进度过后;
haMaxTimeSlaveNotCatchup:表示Slave没有跟上 Master 的最大时间间隔,若在 SyncStateSet 中的 slave 超过该时间间隔会将其从 SyncStateSet 移除。默认为 15000(15s)。
Expand
如果Master Broker发现某个Slave节点赶上了Master节点的进度,需要将其重新加入到SyncStateSet。
需要注意以上两个操作,都需要Master Broker向Controller节点发送通知,请求更新SyncStateSet中的数据。
Master 选举
不管是Controller独立部署,还是嵌入到NameServer中部署,Controller都会监听每个Broker的连接,Broker会定期向Controller发送心跳包,Controller会定时扫描,如果某个Broker心跳包发送超时,会认为这个Broker已经失效,此时会判断Broker是否是Master角色,如果是Master角色就需要从该组的SyncStateSet中重新选出一个节点作为Master。
选举Master的方式比较简单,从该组的SyncStateSet中,挑选一个心跳包发送正常的Slave成为新的Master节点即可,并将结果通知到该组所有的Broker,每个Broker也会定时向Controller发送请求获取主备信息。
最佳实践
一般会为Master配置RAID10磁盘阵列,然后再为其配置一个Slave。即利用了RAID10磁盘阵列的高效、安全性,又解决了可能会影响订阅的问题。
因为,平常RAID10和Slave做备份,如果Master宕机后,RAID10里面会有数据,Slave里面也有数据,Slave会自动上位变成Master
1)RAID磁盘阵列的效率要高于Master-Slave集群。因为RAID是硬件支持的。也正因为如此,所以RAID阵列的搭建成本较高。
2)多Master+RAID阵列,与多Master多Slave集群的区别是什么?
- 多Master+RAID阵列,其仅仅可以保证数据不丢失,即不影响消息写入,但其可能会影响到消息的订阅。但其执行效率要远高于
多Master多Slave集群- 多Master多Slave集群,其不仅可以保证数据不丢失,也不会影响消息写入。其运行效率要低于
多Master+RAID阵列
六、磁盘阵列RAID(补充)
1、RAID历史
1988年美国加州大学伯克利分校的D.A.Patterson教授等首次在论文“ACaseofRedundantArrayofInexpensiveDisks”中提出了RAID概念,即廉价冗余磁盘阵列(RedundantArrayofInexpensiveDisks)。由于当时大容量磁盘比较昂贵,RAID的基本思想是将多个容量较小、相对廉价的磁盘进行有机组合,从而以较低的成本获得与昂贵大容量磁盘相当的容量、性能、可靠性。随着磁盘成本和价格的不断降低,“廉价”已经毫无意义。因此,RAID咨询委员会(RAIDAdvisoryBoard,RAB)决定用“独立”替代“廉价”,于时RAID变成了独立磁盘冗余阵列(RedundantArrayofIndependentDisks)。但这仅仅是名称的变化,实质内容没有改变。
内存:32m6.4G(IBM10.1G)
2、RAID等级
RAID这种设计思想很快被业界接纳,RAID技术作为高性能、高可靠的存储技术,得到了非常广泛的应用。RAID主要利用镜像、数据条带和数据校验三种技术来获取高性能、可靠性、容错能力和扩展性,根据对这三种技术的使用策略和组合架构,可以把RAID分为不同的等级,以满足不同数据应用的需求。
D.A.Patterson等的论文中定义了RAID0RAID6原始RAID等级。随后存储厂商又不断推出RAID7、RAID10、RAID01、RAID50、RAID53、RAID100等RAID等级,但这些并无统一的标准。目前业界与学术界公认的标准是RAID0RAID6,而在实际应用领域中使用最多的RAID等级是RAID0、RAID1、RAID3、RAID5、RAID6和RAID10。
RAID每一个等级代表一种实现方法和技术,等级之间并无高低之分。在实际应用中,应当根据用户的数据应用特点,综合考虑可用性、性能和成本来选择合适的RAID等级,以及具体的实现方式。
3、关键技术
镜像技术
镜像技术是一种冗余技术,为磁盘提供数据备份功能,防止磁盘发生故障而造成数据丢失。对于RAID而言,采用镜像技术最典型地的用法就是,同时在磁盘阵列中产生两个完全相同的数据副本,并且分布在两个不同的磁盘上。镜像提供了完全的数据冗余能力,当一个数据副本失效不可用时,外部系统仍可正常访问另一副本,不会对应用系统运行和性能产生影响。而且,镜像不需要额外的计算和校验,故障修复非常快,直接复制即可。镜像技术可以从多个副本进行并发读取数据,提供更高的读I/O性能,但不能并行写数据,写多个副本通常会导致一定的I/O性能下降。
镜像技术提供了非常高的数据安全性,其代价也是非常昂贵的,需要至少双倍的存储空间。高成本限制了镜像的广泛应用,主要应用于至关重要的数据保护,这种场合下的数据丢失可能会造成非常巨大的损失。
数据条带技术
数据条带化技术是一种自动将I/O操作负载均衡到多个物理磁盘上的技术。更具体地说就是,将一块连续的数据分成很多小部分并把它们分别存储到不同磁盘上。这就能使多个进程可以并发访问数据的多个不同部分,从而获得最大程度上的I/O并行能力,极大地提升性能。
数据校验技术
数据校验技术是指,RAID要在写入数据的同时进行校验计算,并将得到的校验数据存储在RAID成员磁盘中。校验数据可以集中保存在某个磁盘或分散存储在多个不同磁盘中。当其中一部分数据出错时,就可以对剩余数据和校验数据进行反校验计算重建丢失的数据。
数据校验技术相对于镜像技术的优势在于节省大量开销,但由于每次数据读写都要进行大量的校验运算,对计算机的运算速度要求很高,且必须使用硬件RAID控制器。在数据重建恢复方面,检验技术比镜像技术复杂得多且慢得多。
4、RAID分类
从实现角度看,RAID主要分为软RAID、硬RAID以及混合RAID三种。
软RAID
所有功能均有操作系统和CPU来完成,没有独立的RAID控制处理芯片和I/O处理芯片,效率自然最低。
硬RAID
配备了专门的RAID控制处理芯片和I/O处理芯片以及阵列缓冲,不占用CPU资源。效率很高,但成本也很高。
混合RAID
具备RAID控制处理芯片,但没有专门的I/O处理芯片,需要CPU和驱动程序来完成。性能和成本在软RAID和硬RAID之间。
5、常见RAID等级详解
JBOD
JBOD,JustaBunchofDisks,磁盘簇。表示一个没有控制软件提供协调控制的磁盘集合,这是RAID区别与JBOD的主要因素。JBOD将多个物理磁盘串联起来,提供一个巨大的逻辑磁盘。
JBOD的数据存放机制是由第一块磁盘开始按顺序往后存储,当前磁盘存储空间用完后,再依次往后面的磁盘存储数据。JBOD存储性能完全等同于单块磁盘,而且也不提供数据安全保护。
其只是简单提供一种扩展存储空间的机制,JBOD可用存储容量等于所有成员磁盘的存储空间之和
JBOD常指磁盘柜,而不论其是否提供RAID功能。不过,JBOD并非官方术语,官方称为Spanning。
RAID0
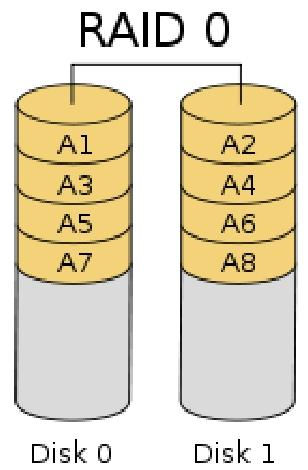
RAID 0 基于数据条带化,数据流被分成多个段或块,每个块都存储在不同的磁盘上。因此,当系统想要读取该数据时,它可以同时从所有磁盘读取数据并将它们连接在一起以重建整个数据流,这样做的好处是读写操作的速度大大提高,它非常适合性能优先于其他方面的情况,此外,整个卷的总容量是各个磁盘容量的总和。
什么是条带化?
数据在多个磁盘之间拆分,在所有磁盘之间平均分配,同时消除任何单个磁盘的过载,可以同时从多个磁盘检索数据,提高了速度,从而提高性能,这就是条带化。
优点
- 数据被剥离到多个驱动器中
- 磁盘空间被充分利用
- 至少需要 2 个驱动器
- 高性能
缺点
- 不支持数据冗余
- 不支持容错
- 没有错误检测机制
- 任一磁盘发生故障都会导致相应阵列中的数据完全丢失
RAID0是一种简单的、无数据校验的数据条带化技术。实际上不是一种真正的RAID,因为它并不提供任何形式的冗余策略。RAID0将所在磁盘条带化后组成大容量的存储空间,将数据分散存储在所有磁盘中,以独立访问方式实现多块磁盘的并读访问。
理论上讲,一个由n块磁盘组成的RAID0,它的读写性能是单个磁盘性能的n倍,但由于总线带宽等多种因素的限制,实际的性能提升低于理论值。由于可以并发执行I/O操作,总线带宽得到充分利用。再加上不需要进行数据校验,RAID0的性能在所有RAID等级中是最高的。
RAID0具有低成本、高读写性能、100%的高存储空间利用率等优点,但是它不提供数据冗余保护,一旦数据损坏,将无法恢复。
应用场景:对数据的顺序读写要求不高,对数据的安全性和可靠性要求不高,但对系统性能要求很高的场景。
RAID0与JBOD相同点:
1)存储容量:都是成员磁盘容量总和
2)磁盘利用率,都是100%,即都没有做任何的数据冗余备份
- RAID0与JBOD不同点:
- JBOD:数据是顺序存放的,一个磁盘存满后才会开始存放到下一个磁盘
- RAID:各个磁盘中的数据写入是并行的,是通过数据条带技术写入的。其读写性能是JBOD的n倍
RAID1
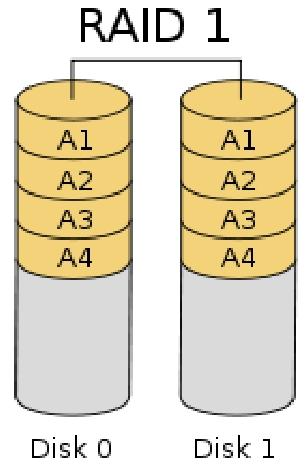
RAID 1 使用数据镜像的概念,数据被镜像或克隆到一组相同的磁盘,这样如果其中一个磁盘出现故障,可以使用另一个。它还提高了读取性能,因为可以同时从所有磁盘访问不同的数据块。
什么是镜像?
数据在多个磁盘之间进行镜像意味着数据的副本存储在不同的存储设备之间,这也将增加冗余和性能。
RAID1就是一种镜像技术,它将数据完全一致地分别写到工作磁盘和镜像磁盘,它的磁盘空间利用率为50%。RAID1在数据写入时,响应时间会有所影响,但是读数据的时候没有影响。RAID1提供了最佳的数据保护,一旦工作磁盘发生故障,系统将自动切换到镜像磁盘,不会影响使用。
RAID1是为了增强数据安全性使两块磁盘数据呈现完全镜像,从而达到安全性好、技术简单、管理方便。RAID1拥有完全容错的能力,但实现成本高。
优点
- 执行数据镜像,即来自一个驱动器的相同数据被写入另一个驱动器以实现冗余。
- 高读取速度,因为如果一个磁盘繁忙,则可以使用任何一个磁盘
- 即使任何一个驱动器发生故障,阵列也能正常工作
- 至少需要 2 个驱动器
缺点
- 费用较高(每个驱动器需要 1 个额外的驱动器用于镜像)
- 由于必须更新所有驱动器,因此写入性能较慢
应用场景:对顺序读写性能要求较高,或对数据安全性要求较高的场景。
RAID10
RAID 10 以相反的顺序将RAID 1和 RAID 0 组合在一起,有时,它也被称为“嵌套”或“混合”RAID,这是一种“两全其美的方法”,因为它具有 RAID 0 的快速性能和 RAID 1 的冗余性。在此设置中,多个 RAID 1 块相互连接,使其像 RAID 0。它用于在需要巨大磁盘性能(大于 RAID 5 或 6)以及冗余的情况下。
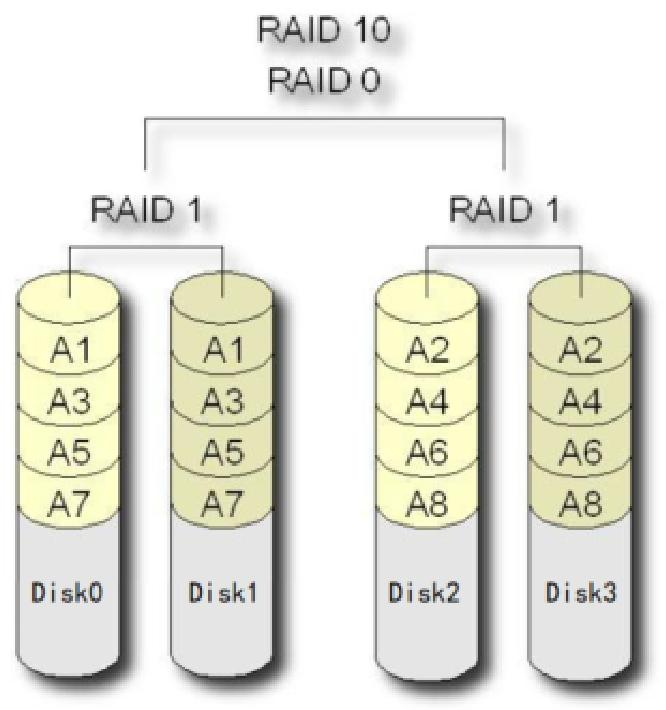
RAID10 是先做镜像,然后再做条带。 RAID01 是先做条带,然后再做镜像。 比如以6个盘为例,RAID10就是先将盘分成3组镜象,然后再对这3个RAID1做条带。 RAID01则是先利用3块盘做RAID0,然后将另外3块盘做为RAID0的镜象。 这种情况中,我们假设当DISK0损坏时,在剩下的3块盘中,只有当DISK1一个盘发生故障时,才会导致整个RAID失效,我们可简单计算故障率为1/3。
优点
- 无奇偶代
- 执行 RAID 0 剥离数据和 RAID 1 镜像
- 剥离在镜像之前执行
- 可用容量为 n/2 * 磁盘大小(n = 磁盘数量)
- 所需的驱动器应该是 2 的倍数
- 剥离数据时的高性能
缺点
- 成本高,因为每个驱动器都需要额外的驱动器
- 100% 的磁盘容量未被使用,因为一半用于镜像
- 可扩展性非常有限
RAID01
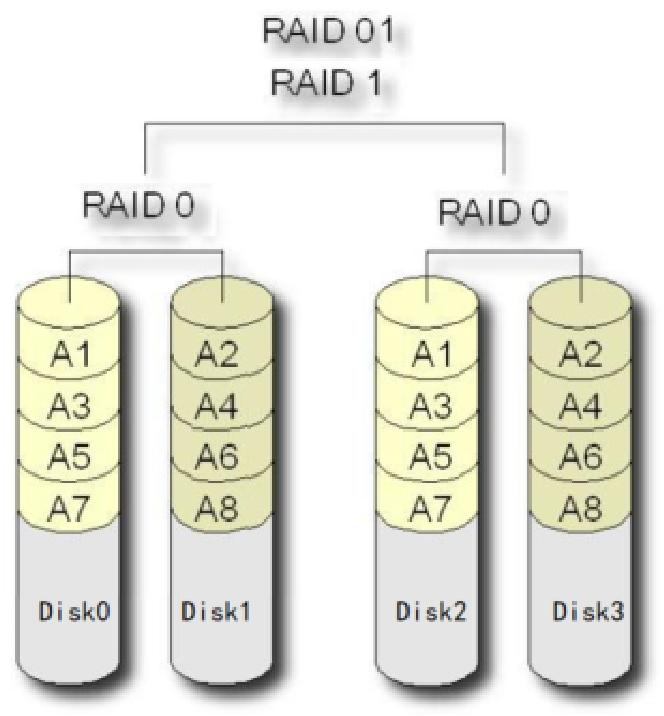
RAID01是一个RAID0与RAID1的组合体,所以它继承了RAID0的快速和RAID1的安全。
简单来说就是,先做条带再做镜像。先做条带,在将进来的数据先做镜像,然后将镜像数据写入到与之前数据不同的磁盘。
这种情况下,我们仍然假设DISK0(磁盘)损坏,这时左边的条带将无法读取。在剩下的3块盘中,只要DISK2,DISK3两个盘中任何一个损坏,都会导致整个RAID失效,我们可简单计算故障率为2/3。
因此RAID10比RAID01在安全性方面要强。
- 从数据存储的逻辑位置来看,在正常的情况下RAID01和RAID10是完全一样的,而且每一个读写操作所产生的IO数量也是一样的,所以在读写性能上两者没什么区别。而当有磁盘出现故障时,比如前面假设的DISK0损坏时,我们也可以发现,这两种情况下,在读的性能上面也将不同,RAID10的读性能将优于RAID01。
RAID10要比RAID01的容错率再高,所以生产环境下一般是不使用RAID01的。
RAID10和RAID01应用场景
RAID 10 是首选方案,因为它结合了RAID 1的高可靠性和RAID 0的高性能,适用于大多数需要高性能和高可靠性的应用场景。 RAID 01 虽然在理论上也提供了数据保护,但其配置复杂且资源利用效率低,因此在实践中很少使用。
七、集群搭建实践
1、集群架构
这里要搭建一个双主双从异步复制的Broker集群。为了方便,这里使用了两台主机来完成集群的搭建。这两台主机的功能与broker角色分配如下表。
| 序号 | 主机名/IP | IP | 功能 | BROKER角色 |
| :–: | :———: | :———–: | :—————: | :————: |
| 1 | rocketmqOS1 | 192.168.0.137 | NameServer+Broker | Master1+Slave2 |
| 2 | rocketmqOS2 | 192.168.0.138 | NameServer+Broker | Master2+Slave1 |
2、克隆生成RocketMQOS1
克隆rocketmqOS主机,并修改配置。指定主机名为rocketmqOS1。
打开终端输入vim /etc/hostname

修改IP,输入vim /etc/sysconfig/network-scripts/ifcfg-ens33
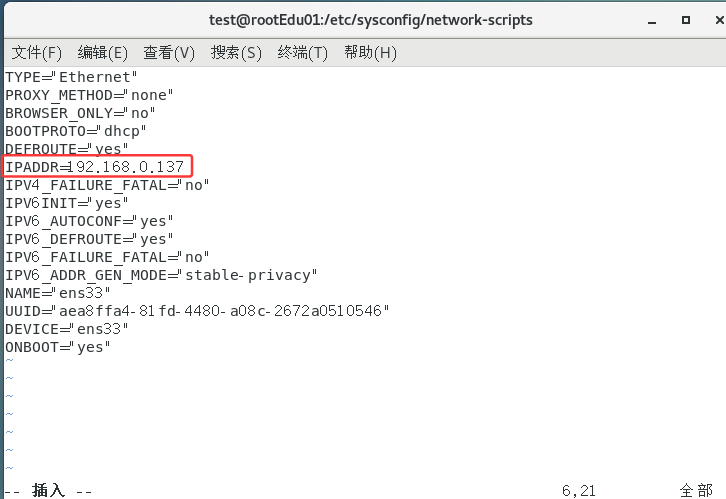
保存退出,使用reboot命令重启
3、修改rocketmqOS1配置文件
配置文件位置
要修改的配置文件在rocketMQ解压目录的conf/2m-2s-async目录中。
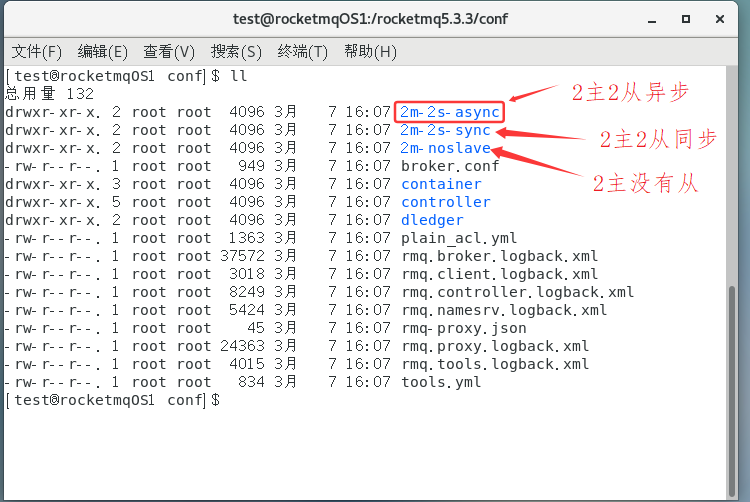
进入到2m-2s-async目录中
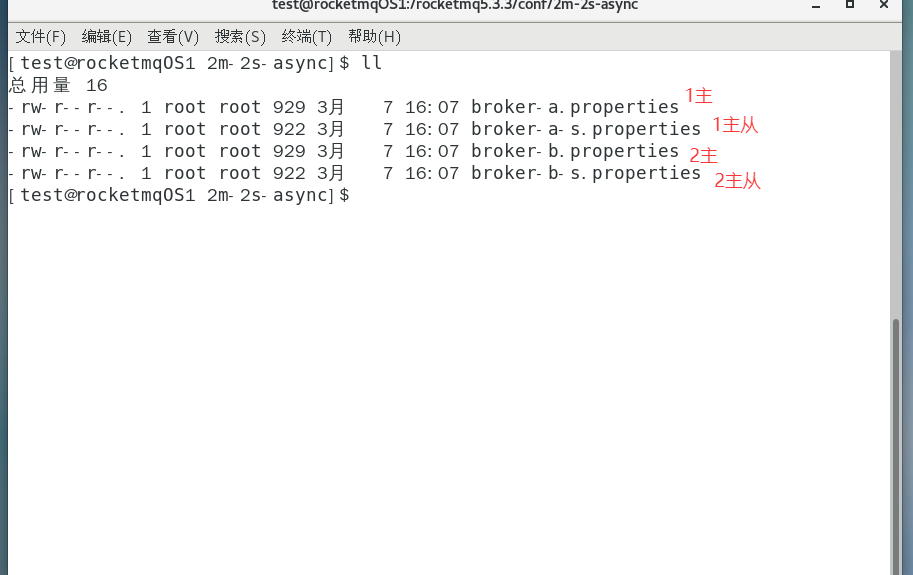
因为我们的rocketmqOS1是Master1+Slave2,所以需要配置broker-a.properties和broker-b-s.properties,其他的可以删了
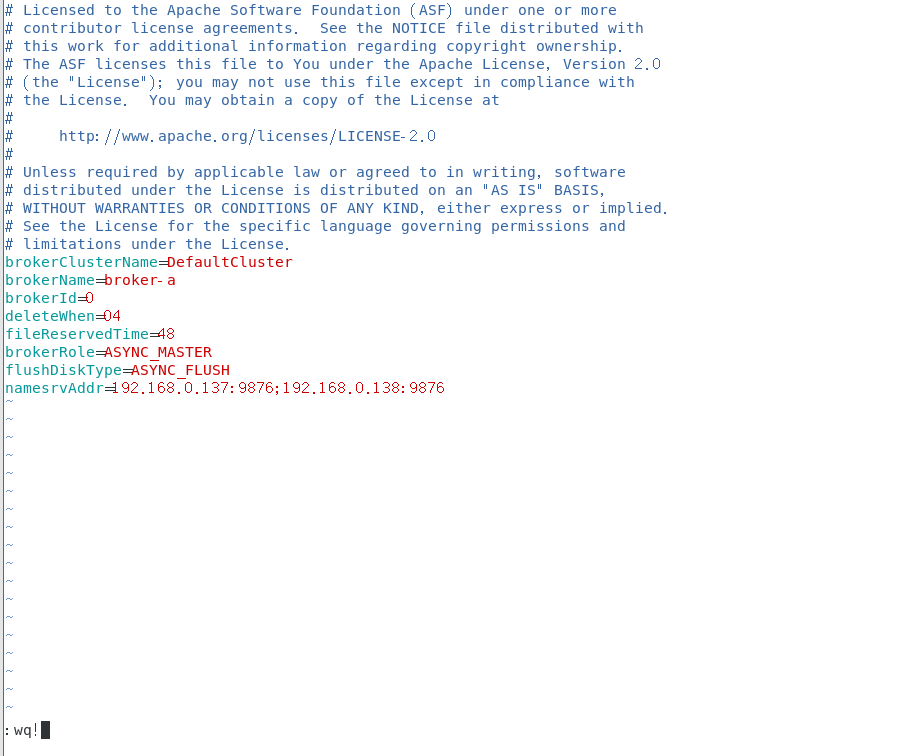
修改broker-a.properties
将该配置文件内容修改为如下:
# 指定整个broker集群的名称,或者说是RocketMQ集群的名称 |
修改broker-b-s.properties
将该配置文件内容修改为如下:
brokerClusterName=DefaultCluster |
其它配置
除了以上配置外,这些配置文件中还可以设置其它属性。
#指定整个broker集群的名称,或者说是RocketMQ集群的名称 |
4、克隆生成rocketmqOS2
克隆rocketmqOS1主机,并修改配置。指定主机名为rocketmqOS2,并且设置为IP地址为192.168.0.138,修改完IP地址后重启一下。
5、修改rocketmqOS2配置文件
对于rocketmqOS2主机,同样需要修改rocketMQ解压目录的conf目录的子目录2m-2s-async中的两个配置文件。
修改broker-b.properties
将该配置文件内容修改为如下:
brokerClusterName=DefaultCluster |
修改broker-a-s.properties
将该配置文件内容修改为如下:
brokerClusterName=DefaultCluster |
其它配置
除了以上配置外,这些配置文件中还可以设置其它属性。
#指定整个broker集群的名称,或者说是RocketMQ集群的名称 |
6、启动服务器
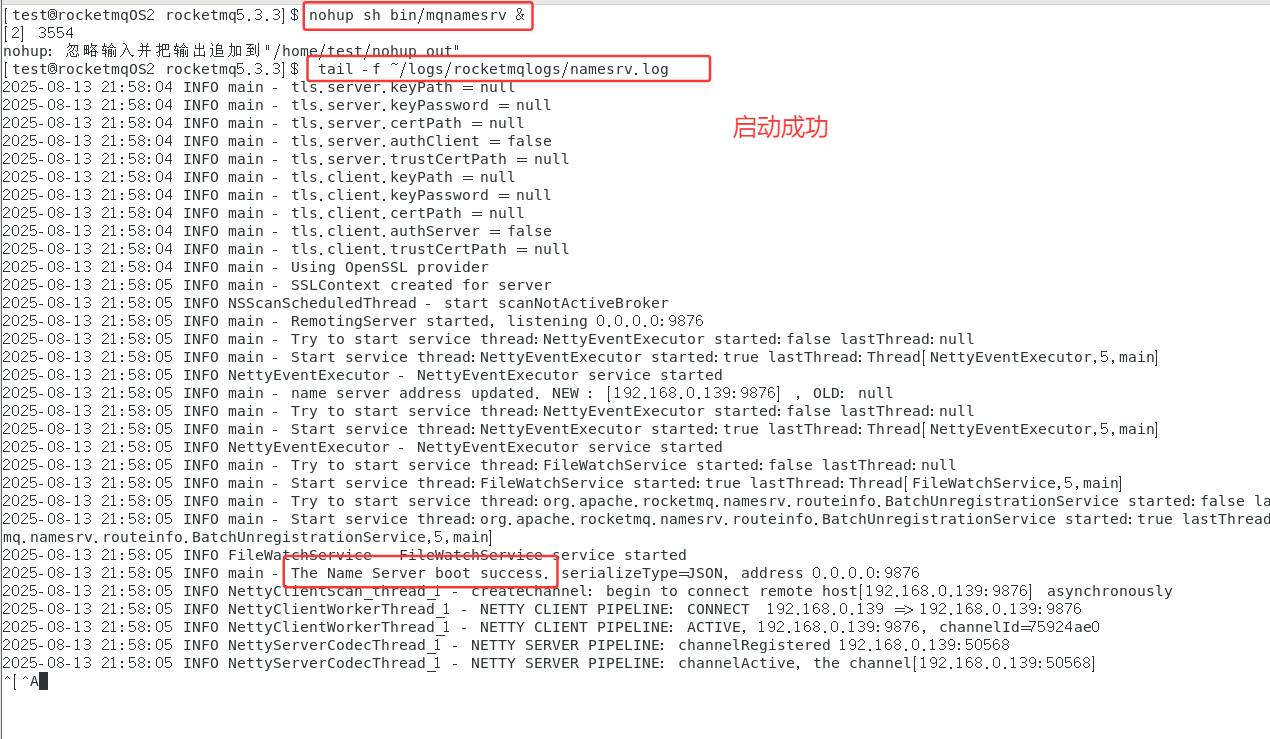
启动NameServer集群
分别启动rocketmqOS1与rocketmqOS2两个主机中的NameServer。启动命令完全相同。
nohup sh bin/mqnamesrv & |
rocketmqOS1启动NameServer
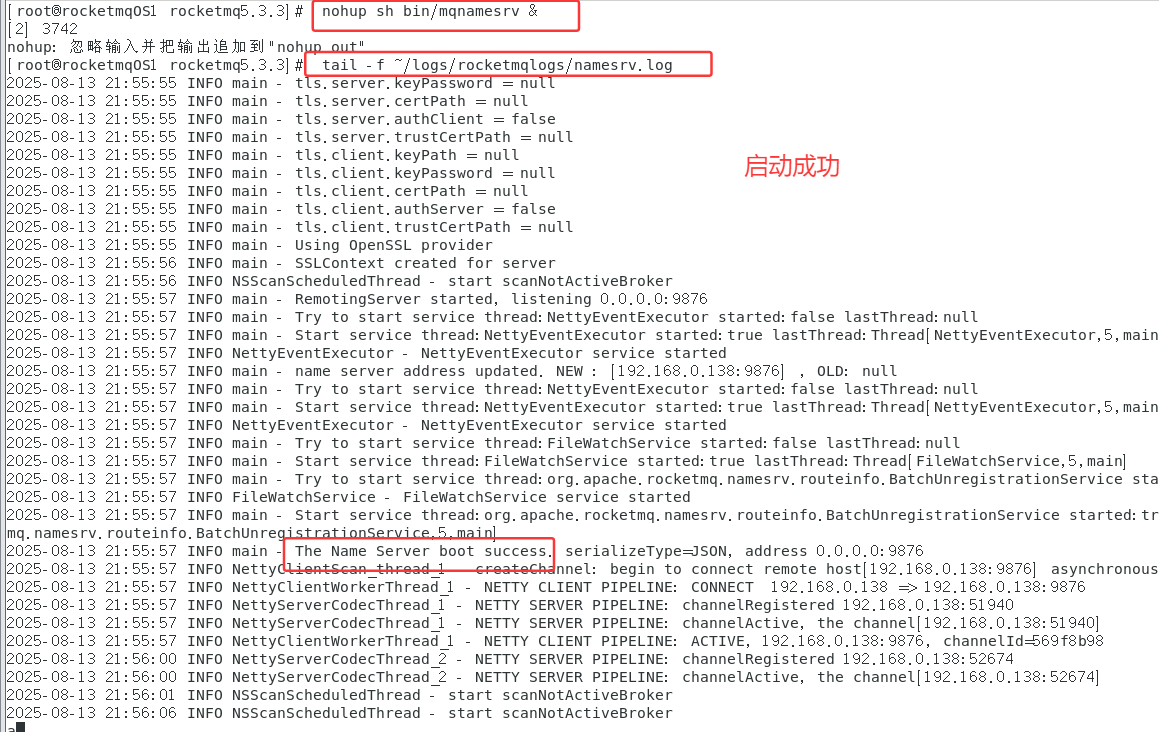
rocketmqOS2启动NameServer
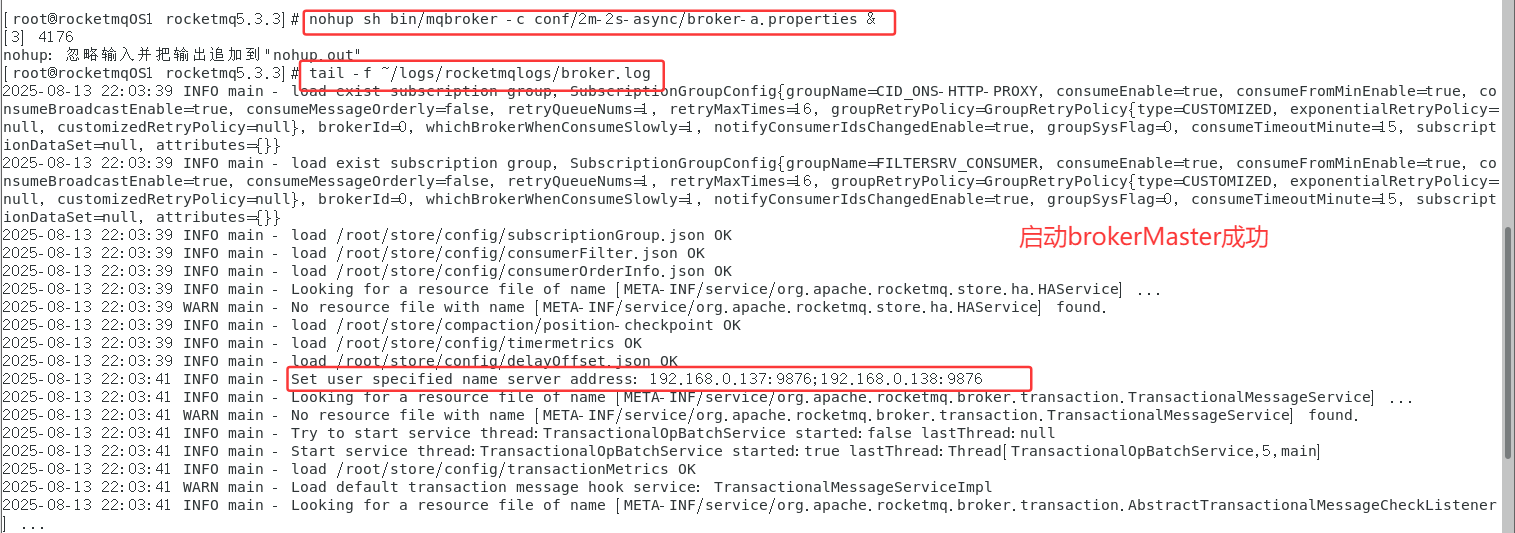
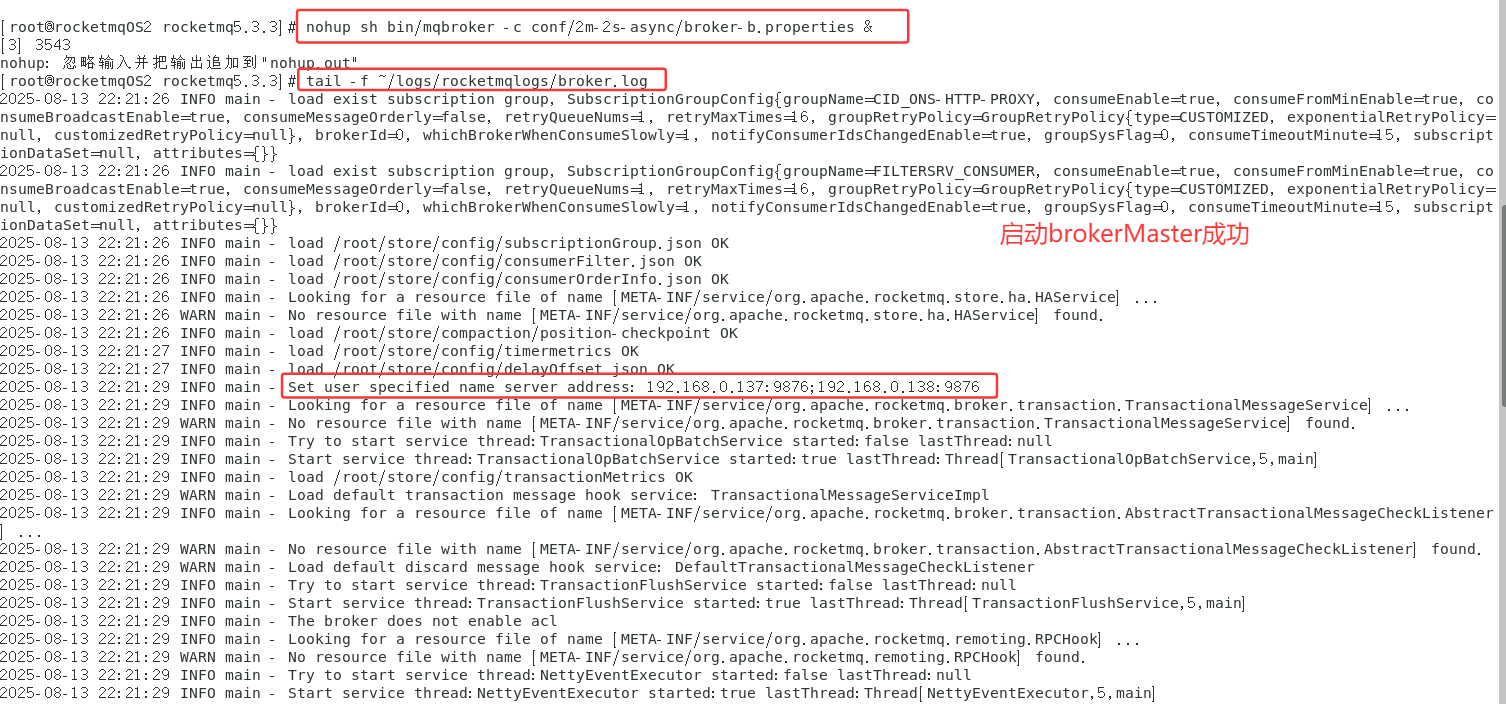
启动两个Master
分别启动rocketmqOS1与rocketmqOS2两个主机中的brokermaster。注意,它们指定所要加载的配置文件是不同的。
rocketmqOS1
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-a.properties & |
rocketmqOS2
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-b.properties & |
rocketmqOS1启动brokermaster
rocketmqOS2启动brokermaster
注意:先启动
rocketmqOS1 NameServer和rocketmqOS2 NameServer不然启动任何一个都会报错!
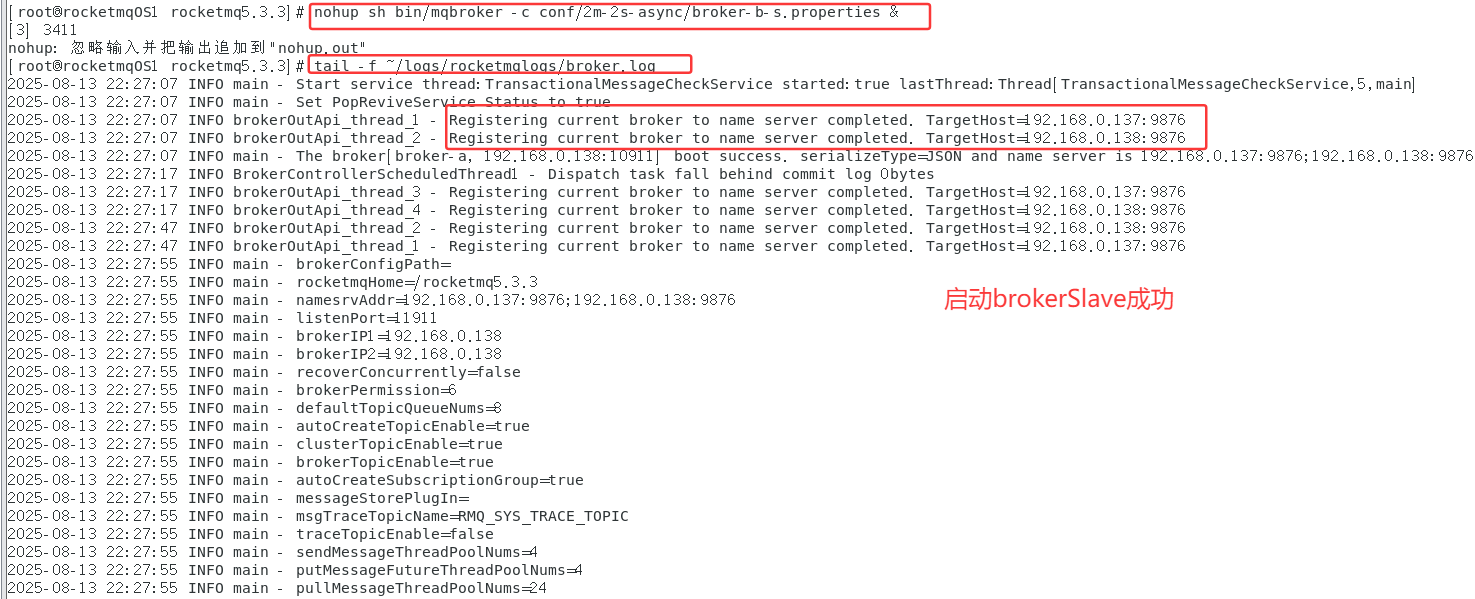
启动两个Slave
分别启动rocketmqOS1与rocketmqOS2两个主机中的brokerslave。注意,它们指定所要加载的配置文件是不同的。
rocketmqOS1
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-b-s.properties & |
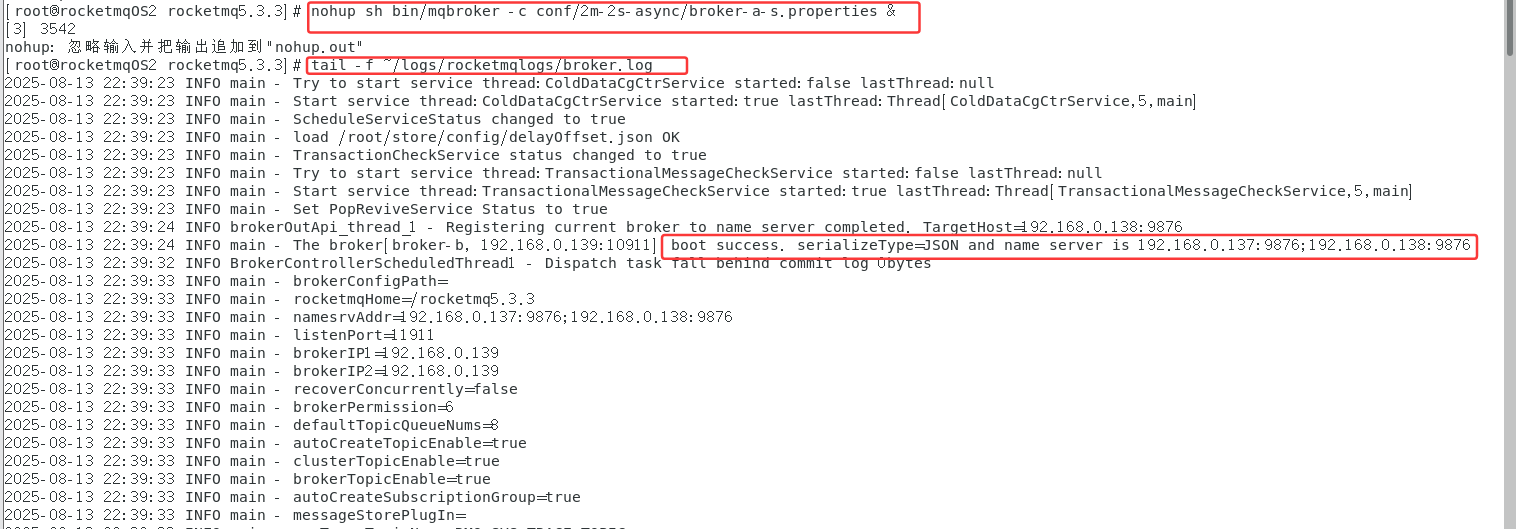
rocketmqOS2
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-a-s.properties & |
rocketmqOS1启动brokerslave
rocketmqOS2启动brokerslave
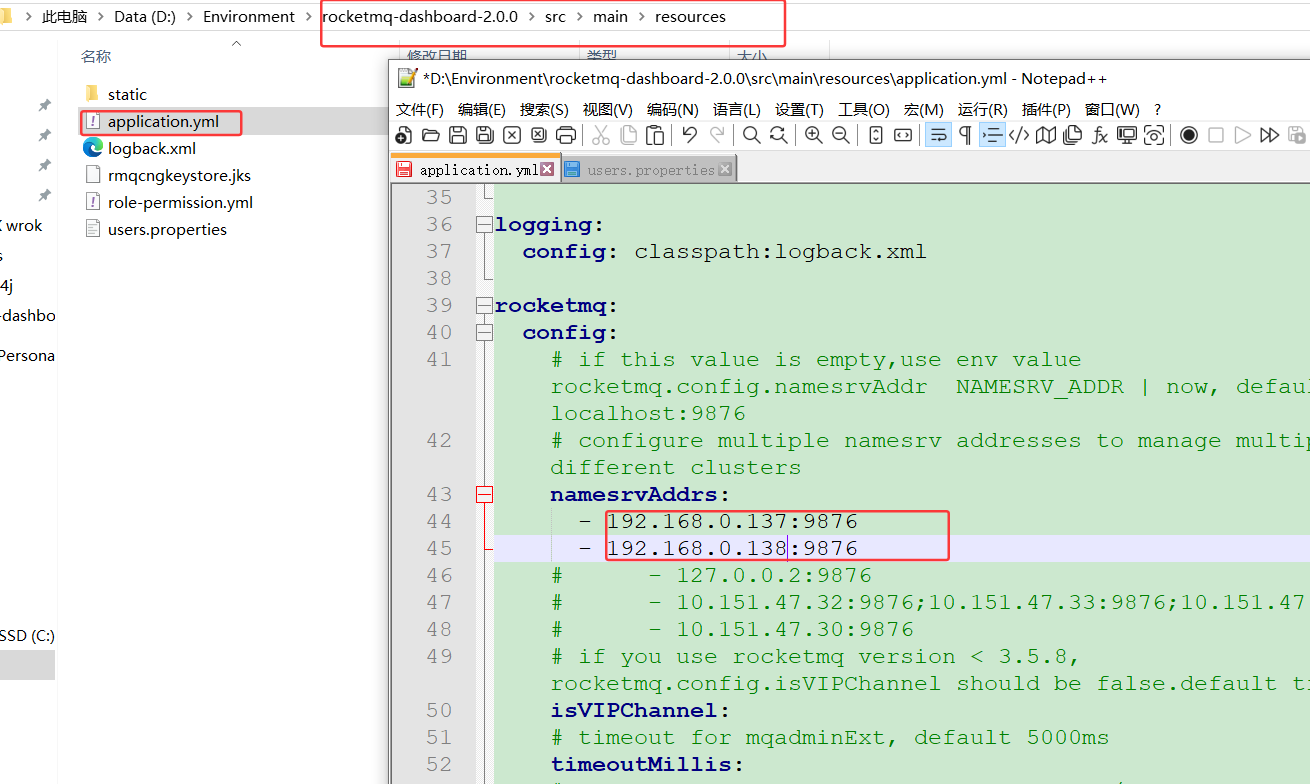
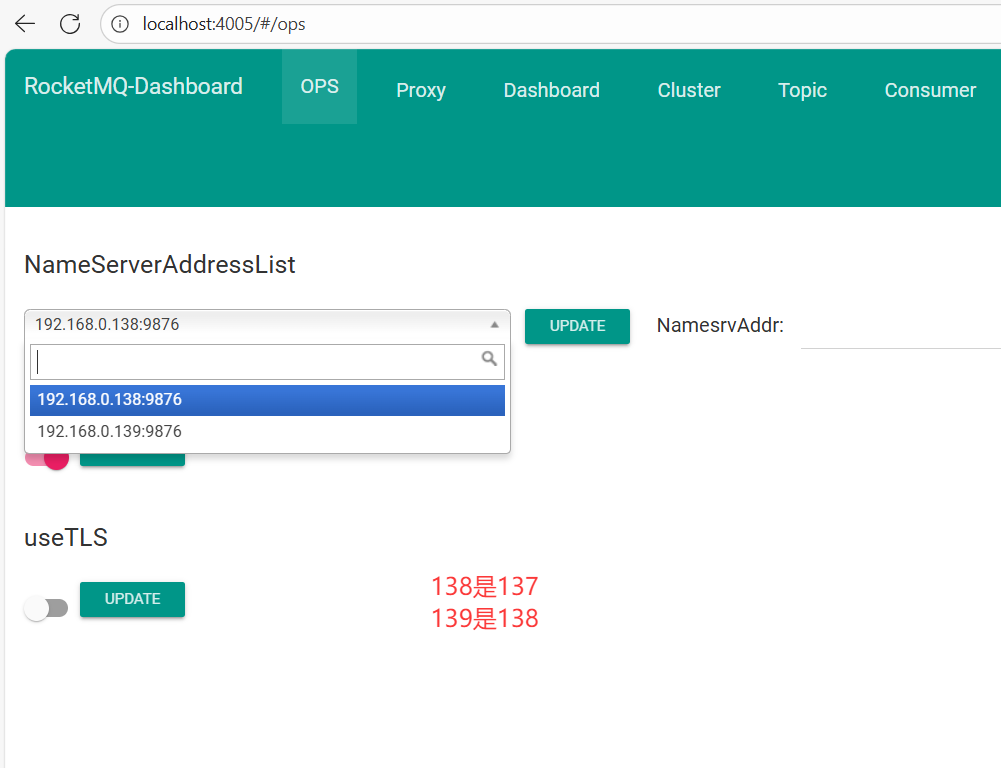
7、dashboard访问
修改application.yml,添加NameServer地址
重新打包maven,然后生成jar包,启动jar包
八、mqadmin命令
在mq解压目录的bin目录下有一个mqadmin命令,该命令是一个运维指令,用于对mq的主题,集群,broker等信息进行管理。
1、修改bin/tools.sh
在运行mqadmin命令之前,先要修改mq解压目录下bin/tools.sh配置的JDK的ext目录位置。本机的ext 目录在/usr/java/jdk1.8.0_161/jre/lib/ext。
使用vim命令打开tools.sh文件,并在JAVA_OPT配置的-Djava.ext.dirs这一行的后面添加ext的路径。

JAVA_OPT="${JAVA_OPT} -server -Xms1g -Xmx1g -Xmn256m |
2、运行mqadmin
直接运行该命令,可以看到其可以添加的commands。通过这些commands可以完成很多的功能。
详细命令请访问:https://rocketmq.apache.org/zh/docs/deploymentOperations/02admintool
3、该命令的官网详解
该命令在官网中有详细的用法解释。
github:https://github.com/apache/rocketmq/blob/master/docs/cn/operation.md
官网:https://rocketmq.apache.org/zh/docs/deploymentOperations/01deploy


第3章RocketMQ工作原理
一、消息的生产
1、消息的生产过程
Producer可以将消息写入到某Broker中的某Queue中,其经历了如下过程:
- Producer发送消息之前,会先向NameServer发出获取
消息Topic的路由信息的请求 - NameServer返回该Topic的
路由表及Broker列表 - Producer根据代码中指定的Queue选择策略,从Queue列表中选出一个队列,用于后续存储消息
- Produer对消息做一些特殊处理,例如,消息本身超过4M,则会对其进行压缩
- Producer向选择出的Queue所在的Broker发出RPC请求,将消息发送到选择出的Queue
路由表:实际是一个Map,key为Topic名称,value是一个QueueData实例列表。QueueData并不 是一个Queue对应一个QueueData,而是一个Broker中该Topic的所有Queue对应一个 QueueData。即,只要涉及到该Topic的Broker,一个Broker对应一个QueueData。QueueData中 包含brokerName。简单来说,路由表的key为Topic名称,value则为所有涉及该Topic的 BrokerName列表。
Broker列表:其实际也是一个Map。key为brokerName,value为BrokerData。一个Broker对应一 个BrokerData实例,对吗?不对。一套brokerName名称相同的Master-Slave小集群对应一个 BrokerData。BrokerData中包含brokerName及一个map。该map的key为brokerId,value为该 broker对应的地址。brokerId为0表示该broker为Master,非0表示Slave。
2、Queue选择算法
对于无序消息,其Queue选择算法,也称为消息投递算法,常见的有两种:
轮询算法默认选择算法。该算法保证了每个Queue中可以均匀的获取到消息。
该算法存在一个问题:由于某些原因,在某些Broker上的Queue可能投递延迟较严重。从而导致 Producer的缓存队列中出现较大的消息积压,影响消息的投递性能。
最小投递延迟算法该算法会统计每次消息投递的时间延迟,然后根据统计出的结果将消息投递到时间延迟最小的Queue。 如果延迟相同,则采用轮询算法投递。该算法可以有效提升消息的投递性能。
该算法也存在一个问题:消息在Queue上的分配不均匀。投递延迟小的Queue其可能会存在大量 的消息。而对该Queue的消费者压力会增大,降低消息的消费能力,可能会导致MQ中消息的堆 积。
二、消息的存储
存储⽂件主要分为三个部分:
CommitLog:
存储消息的元数据。所有消息都会顺序存⼊到CommitLog⽂件当中。CommitLog由多个⽂件组成,每个⽂件固定⼤⼩1G。以第⼀条消 息的偏移量为⽂件名。
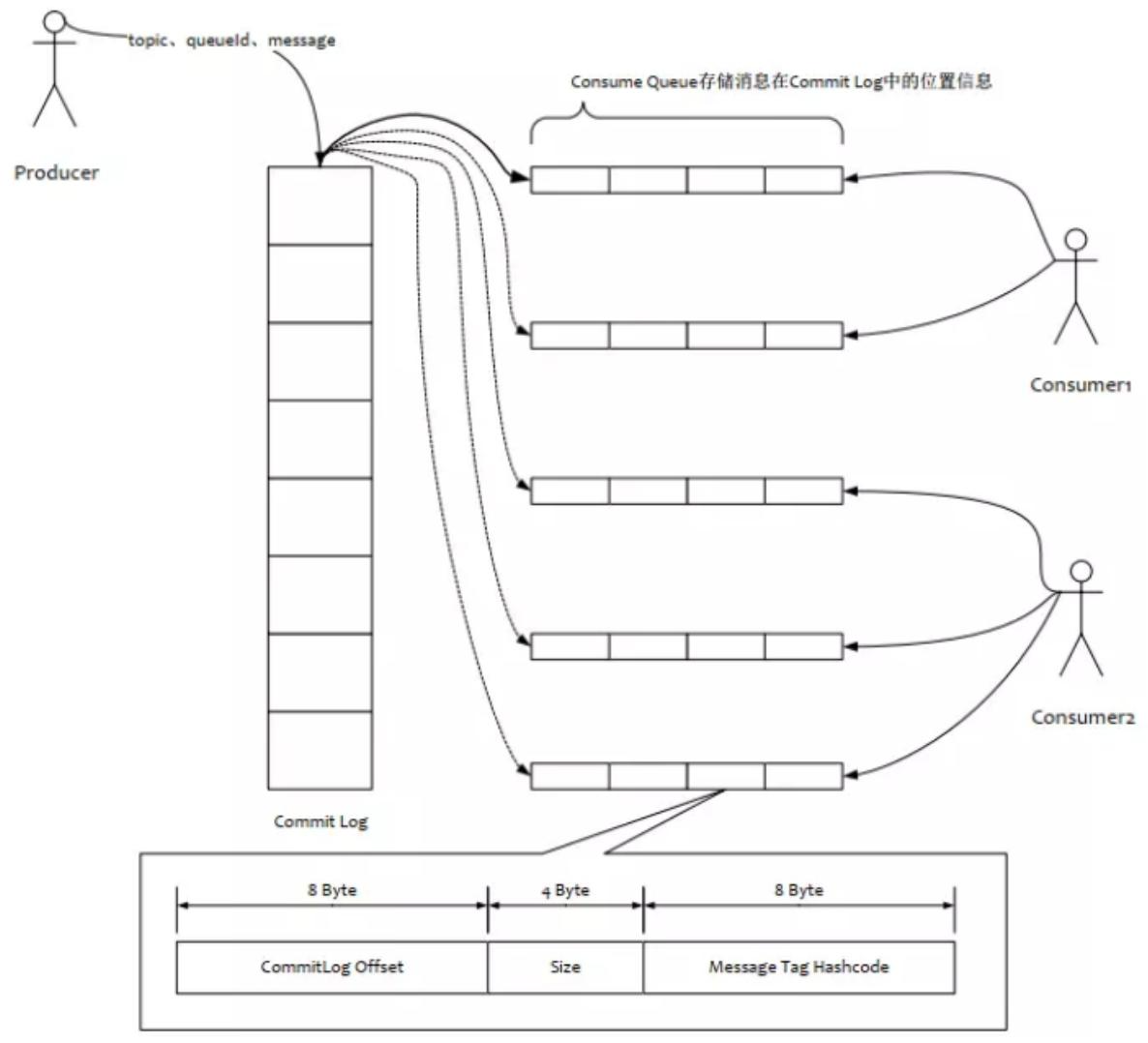
ConsumerQueue:
存储消息在CommitLog的索引。⼀个MessageQueue⼀个⽂件,记录当前MessageQueue被哪些消费者组消费到了哪⼀条CommitLog。
IndexFile:
为了消息查询提供了⼀种通过key或时间区间来查询消息的⽅法,这种通过IndexFile来查找消息的⽅法不影响发送与消费消息的主流程。
RocketMQ中的消息存储在本地文件系统中,这些相关文件默认在当前用户主目录下的store目录中。
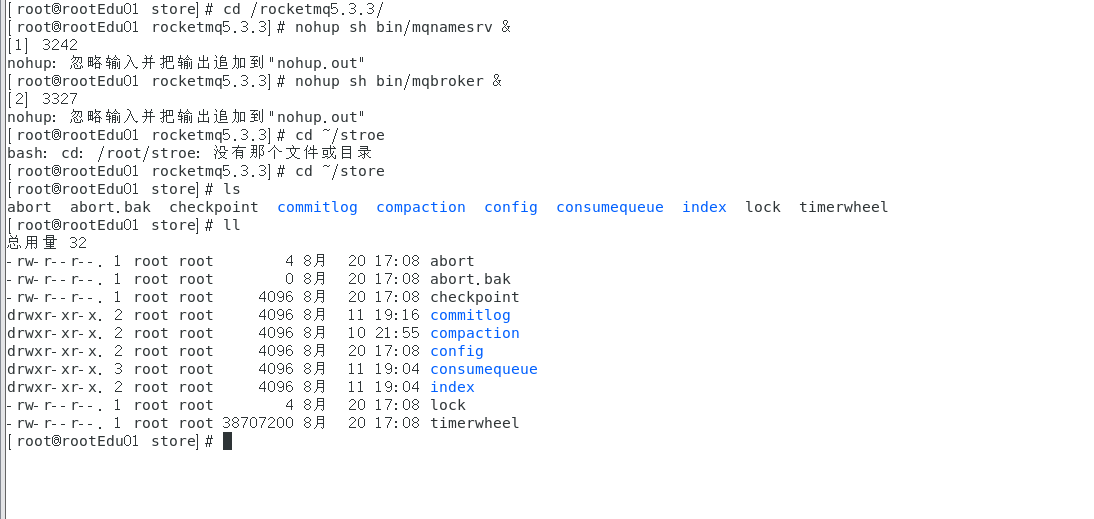
上述是rocketmq5.3.3版本增加了,abort.bak、compaction、timerwheel
- abort:该文件在Broker启动后会自动创建,正常关闭Broker,该文件会自动消失。若在没有启动 Broker的情况下,发现这个文件是存在的,则说明之前Broker的关闭是非正常关闭。
- checkpoint:其中存储着commitlog、consumequeue、index文件的最后刷盘时间戳
- commitlog:其中存放着commitlog文件,而消息是写在commitlog文件中的
- config:存放着Broker运行期间的一些配置数据
- consumequeue:其中存放着consumequeue文件,队列就存放在这个目录中
- index:其中存放着消息索引文件indexFile
- lock:运行期间使用到的全局资源锁
- timerwheel:定时消息调度日志目录。这是 RocketMQ 5.x 对延时消息/定时消息架构的重大改进,取代了 4.x 版本中基于
SCHEDULE_TOPIC_XXXX的实现方式。
1、commitlog文件(存放消息)
说明:在很多资料中commitlog目录中的文件简单就称为commitlog文件。但在源码中,该文件被命名为mappedFile。
目录与文件
commitlog目录中存放着很多的mappedFile文件,当前Broker中的所有消息都是落盘到这些
mappedFile文件中的。mappedFile文件大小为1G(小于等于1G),文件名由20位十进制数构成,表示当前文件的第一条消息的起始位移偏移量。
第一个文件名一定是20位0构成的。因为第一个文件的第一条消息的偏移量commitlog offset为0
当第一个文件放满时,则会自动生成第二个文件继续存放消息。假设第一个文件大小是 1073741820字节(1G = 1073741824字节),则第二个文件名就是00000000001073741824。
以此类推,第n个文件名应该是前 n-1个文件大小之和。
一个Broker中所有mappedFile文件的commitlog offset是连续的
需要注意的是,一个Broker中仅包含一个commitlog目录,所有的mappedFile文件都是存放在该目录中 的。即无论当前Broker中存放着多少Topic的消息,这些消息都是被顺序写入到了mappedFile文件中的。也就是说,这些消息在Broker中存放时并没有被按照Topic进行分类存放。
mappedFile文件是顺序读写的文件,所以其访问效率很高
无论是SSD磁盘还是SATA磁盘,通常情况下,顺序存取效率都会高于随机存取。
消息单元
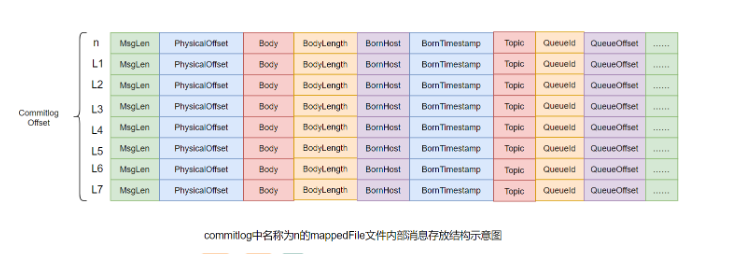
mappedFile文件内容由一个个的消息单元构成。每个消息单元中包含消息总长度MsgLen、消息的物理 位置physicalOffset、消息体内容Body、消息体长度BodyLength、消息主题Topic、Topic长度 TopicLength、消息生产者BornHost、消息发送时间戳BornTimestamp、消息所在的队列QueueId、消 息在Queue中存储的偏移量QueueOffset等近20余项消息相关属性。
需要注意到,消息单元中是包含Queue相关属性的。所以,我们在后续的学习中,就需要十分留意commitlog与queue间的关系是什么?
一个mappedFile文件中第m+1个消息单元的commitlog offset偏移量
- L(m+1) = L(m) + MsgLen(m) (m >= 0)
2、consumequeue(存储消息在CommitLog的索引)
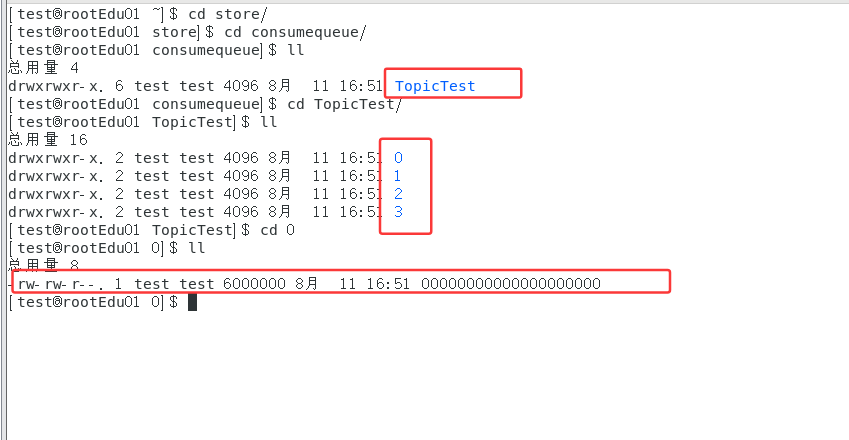
目录与文件
为了提高效率,会为每个Topic在~/store/consumequeue中创建一个目录,目录名为Topic名称。在该 Topic目录下,会再为每个该Topic的Queue建立一个目录,目录名为queueId。每个目录中存放着若干 consumequeue文件,consumequeue文件是commitlog的索引文件,可以根据consumequeue定位到具体的消息。
consumequeue文件名也由20位数字构成,表示当前文件的第一个索引条目的起始位移偏移量。与mappedFile文件名不同的是,其后续文件名是固定的。因为consumequeue文件大小是固定不变的。
索引条目
每个 ConsumeQueue 条目占用 20 字节,包含以下三个字段:
| 字段名 | 长度(字节) | 说明 |
| :——————- | :———– | :————————————————— |
| CommitLog Offset | 8 | 消息在 CommitLog 文件中的物理偏移量。 |
| Message Length | 4 | 消息的长度。 |
| Tag HashCode | 8 | 消息 Tag 的哈希值,用于快速查找具有相同 Tag 的消息。 |
这种固定长度的设计使得 ConsumeQueue 文件可以像数组一样随机访问,极大地提高了读取性能
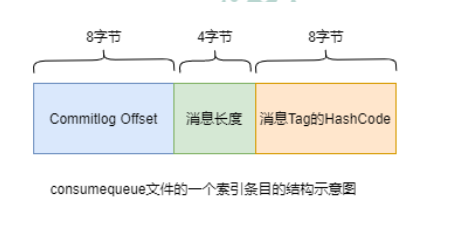
每个consumequeue文件可以包含30w个索引条目,每个索引条目包含了三个消息重要属性:消息在 mappedFile文件中的偏移量CommitLog Offset、消息长度(MsgLen)、消息Tag的hashcode值。这三个属性占20个字节,所以每个文件的大小是固定的30w * 20字节。
一个consumequeue文件中所有消息的Topic一定是相同的。但每条消息的Tag可能是不同的。
3、对文件的读写
消息写入
一条消息进入到Broker后经历了以下几个过程才最终被持久化。
- Broker根据queueId,获取到该消息对应索引条目要在consumequeue目录中的写入偏移量,即 QueueOffset
- 将queueId、queueOffset等数据,与消息一起封装为消息单元
- 将消息单元写入到commitlog
- 同时,形成消息索引条目
- 将消息索引条目分发到相应的consumequeue
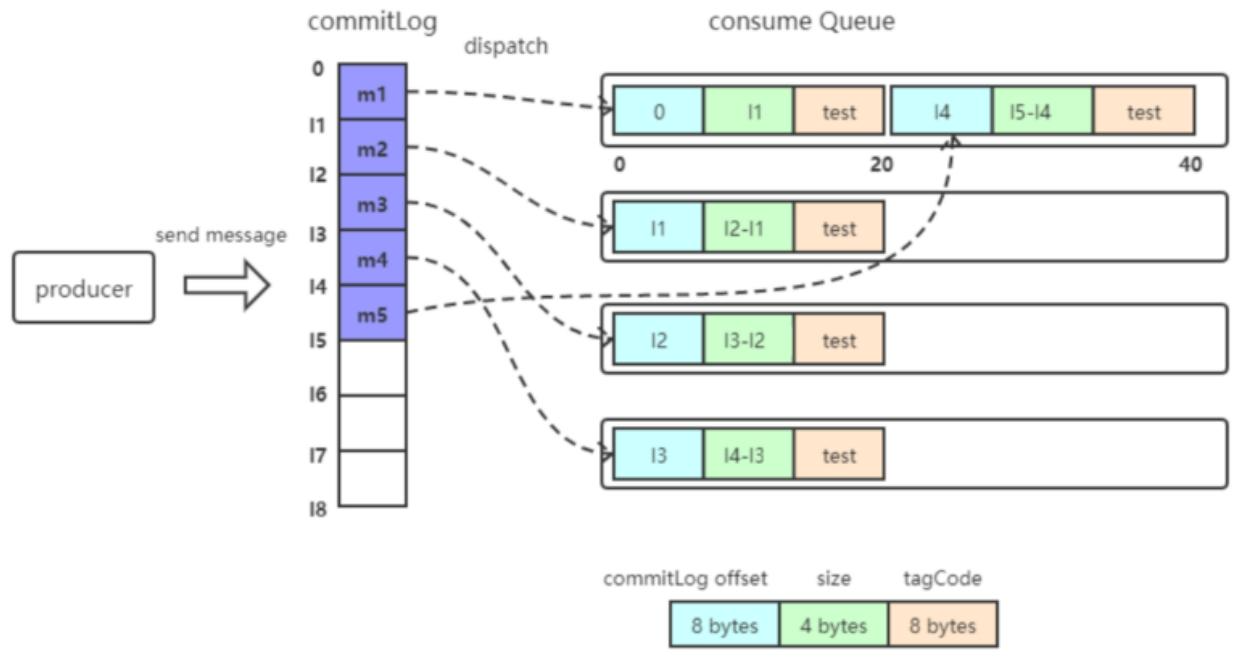
消息拉取
当Consumer来拉取消息时会经历以下几个步骤:
Consumer获取到其要消费消息所在Queue的
消费偏移量offset,计算出其要消费消息的消息offset消费offset即消费进度,consumer对某个Queue的消费offset,即消费到了该Queue的第几条消息
消息offset = 消费offset + 1
Consumer向Broker发送拉取请求,其中会包含其要拉取消息的Queue、消息offset及消息 Tag。
Broker计算在该consumequeue中的queueOffset。
queueOffset = 消息offset * 20 字节(commit offset 8字节+size 4字节+tagCode 8字节)
从该queueOffset处开始向后查找第一个指定Tag的索引条目。
解析该索引条目的前8个字节,即可定位到该消息在commitlog中的commitlog offset
从对应commitlog offset中读取消息单元,并发送给Consumer
性能提升
RocketMQ中,无论是消息本身还是消息索引,都是存储在磁盘上的。其不会影响消息的消费吗?当然不会。其实RocketMQ的性能在目前的MQ产品中性能是非常高的。因为系统通过一系列相关机制大大 提升了性能。
首先,RocketMQ对文件的读写操作是通过mmap零拷贝进行的,将对文件的操作转化为直接对内存地 址进行操作,从而极大地提高了文件的读写效率。
其次,consumequeue中的数据是顺序存放的,还引入了PageCache的预读取机制,使得对 consumequeue文件的读取几乎接近于内存读取,即使在有消息堆积情况下也不会影响性能。
PageCache机制,页缓存机制,是OS(Operating System 操作系统)对文件的缓存机制,用于加速对文件的读写操作。一般来说,程序对文件进行
顺序读写的速度几乎接近于内存读写速度,主要原因是由于OS使用PageCache机制对读写访问操作进行性能优化,将一部分的内存用作PageCache。
- 写操作:OS会先将数据写入到PageCache中,随后会以异步方式由( 内核线程将Cache中的数据刷盘到物理磁盘
- 读操作:若用户要读取数据,其首先会从PageCache中读取,若没有命中,则OS在从物理磁 盘上加载该数据到PageCache的同时,也会顺序对其相邻数据块中的数据进行
预读取。
RocketMQ中可能会影响性能的是对commitlog文件的读取。因为对commitlog文件来说,读取消息时 会产生大量的随机访问,而随机访问会严重影响性能。不过,如果选择合适的系统IO调度算法,比如设置调度算法为Deadline(采用SSD固态硬盘的话),随机读的性能也会有所提升。
什么是零拷贝 (Zero-copy)?
零拷贝技术是一种在计算机执行操作时,避免CPU将数据从一个内存区域复制到另一个特定区域的技术。它通常用于通过网络传输文件,以节省CPU周期和内存带宽。
什么是 mmap零拷贝?
mmap(内存映射)是一种将文件映射到进程虚拟内存空间的技术。通过对这段内存的读取和修改,可以实现对文件的读取和修改,而不需要使用传统的read和write系统调用,从而减少一次CPU拷贝。
传统文件传输 vs mmap 方式
为了更好地理解 mmap 如何实现零拷贝,我们先看一个传统方式的例子。
场景:将服务器上的一个文件通过网络发送出去(例如,下载文件)
传统方式(非零拷贝)的步骤:
- read 系统调用: 应用程序调用
read函数。 - DMA 第一次拷贝: DMA(直接内存访问)控制器将文件数据从磁盘拷贝到内核空间的缓冲区(Kernel Buffer)。(第一次拷贝,DMA完成,不占用CPU)
- CPU 第二次拷贝: CPU 将数据从内核缓冲区拷贝到用户空间的缓冲区(User Buffer)。(第二次拷贝,发生上下文切换,占用CPU)
- write 系统调用: 应用程序调用
write函数。 - CPU 第三次拷贝: CPU 将数据从用户缓冲区拷贝回内核空间的Socket缓冲区(Socket Buffer)。(第三次拷贝,发生上下文切换,占用CPU)
- DMA 第四次拷贝: DMA 控制器将数据从 Socket 缓冲区拷贝到网卡缓冲区(NIC Buffer),最终通过网络发送出去。(第四次拷贝,DMA完成)
传统方式的问题:
- 4次上下文切换(用户态<->内核态切换)。
- 4次数据拷贝(其中2次是昂贵的CPU拷贝)。
- 大量的CPU时间浪费在数据拷贝和上下文切换上。
4、与Kafka的对比
RocketMQ的很多思想来源于Kafka,其中commitlog与consumequeue就是。
RocketMQ中的commitlog目录与consumequeue的结合就类似于Kafka中的partition分区目录。 mappedFile文件就类似于Kafka中的segment段。
Kafka中的Topic的消息被分割为一个或多个partition。partition是一个物理概念,对应到系统上就是topic目录下的一个或多个目录。每个partition中包含的文件称为segment,是具体存放消息的文件。
Kafka中消息存放的目录结构是:topic目录下有partition目录,partition目录下有segment文件
Kafka中没有二级分类标签Tag这个概念
Kafka中无需索引文件。因为生产者是将消息直接写在了partition中的,消费者也是直接从 partition中读取数据的
三、indexFile
IndexFile,又可以称作索引文件,是 RocketMQ 保存在磁盘上的一种文件,属于 RocketMQ 存储的一部分。它的结构类似于类似 JDK中 HashMap。
可以通过messageIndexEnable属性配置打开或关闭 IndexFile 存储功能。
除了通过通常的指定Topic进行消息消费外,RocketMQ还提供了根据key进行消息查询的功能。该查询 是通过store目录中的index子目录中的indexFile进行索引实现的快速查询。当然,这个indexFile中的索 引数据是在包含了key的消息被发送到Broker时写入的。如果消息中没有包含key,则不会写入。
1、索引文件作用
索引文件的应用场景其实比较局限,是为了提供按照 Message Key 查询消息的能力。索引文件可以通过 Message Key,查询到消息在 CommitLog 中的物理偏移量,进而从 CommitLog 中查询消息。
2、索引条目结构
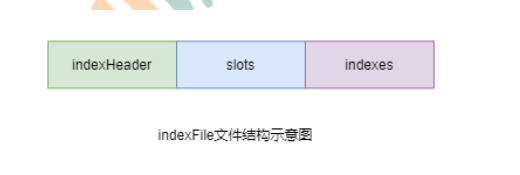
每个Broker中会包含一组indexFile,每个indexFile都是以一个时间戳命名的(这个indexFile被创建时的时间戳)。每个indexFile文件由三部分构成:indexHeader,slots槽位,indexes索引数据。每个 indexFile文件中包含500w个slot槽。而每个slot槽又可能会挂载很多的index索引单元。
indexHeader固定40个字节,其中存放着如下数据:
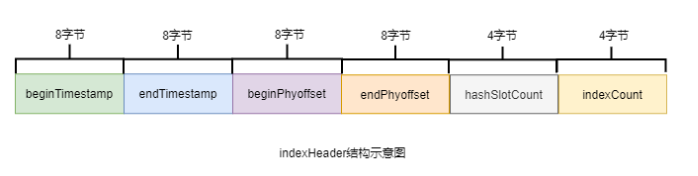
- beginTimestamp:该indexFile中第一条消息的存储时间
- endTimestamp:该indexFile中最后一条消息存储时间
- beginPhyoffset:该indexFile中第一条消息在commitlog中的偏移量commitlog offset
- endPhyoffset:该indexFile中最后一条消息在commitlog中的偏移量commitlog offset
- hashSlotCount:已经填充有index的slot数量(并不是每个slot槽下都挂载有index索引单元,这里统计的是所有挂载了index索引单元的slot槽的数量)
- indexCount:该indexFile中包含的索引单元个数(统计出当前indexFile中所有slot槽下挂载的所有index索引单元的数量之和)
indexFile中最复杂的是Slots与Indexes间的关系。在实际存储时,Indexes是在Slots后面的,但为了便于理解,将它们的关系展示为如下形式:
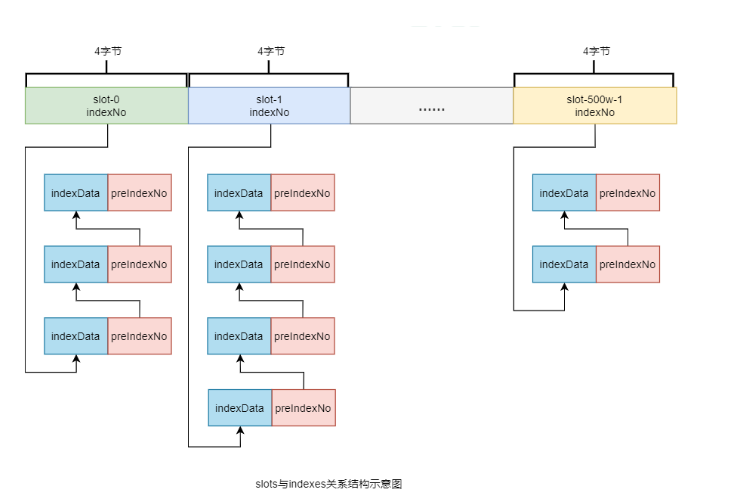
key的hash值 % 500w 的结果即为slot槽位,然后将该slot值修改为该index索引单元的indexNo,根据这个indexNo可以计算出该index单元在indexFile中的位置。不过,该取模结果的重复率是很高的,为了解决该问题,在每个index索引单元中增加了preIndexNo,用于指定该slot中当前index索引单元的 前一个index索引单元。而slot中始终存放的是其下最新的index索引单元的indexNo,这样的话,只要找到了slot就可以找到其最新的index索引单元,而通过这个index索引单元就可以找到其之前的所有index索引单元。
indexNo是一个在indexFile中的流水号,从0开始依次递增。即在一个indexFile中所有indexNo是依次递增的。indexNo在index索引单元中是没有体现的,其是通过indexes中依次数出来的。
index索引单元默写20个字节,其中存放着以下四个属性:
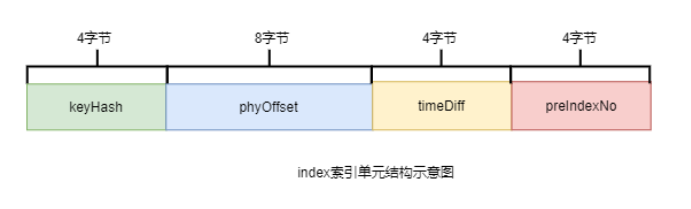
- keyHash:消息中指定的业务key的hash值
- phyOffset:当前key对应的消息在commitlog中的偏移量commitlog offset
- timeDiff:当前key对应消息的存储时间与当前indexFile创建时间的时间差
- preIndexNo:当前slot下当前index索引单元的前一个index索引单元的indexNo
3、indexFile的创建
indexFile的文件名为当前文件被创建时的时间戳。这个时间戳有什么用处呢?
根据业务key进行查询时,查询条件除了key之外,还需要指定一个要查询的时间戳,表示要查询不大于 该时间戳的最新的消息,即查询指定时间戳之前存储的最新消息。这个时间戳文件名可以简化查询,提高查询效率。具体后面会详细说
indexFile文件是何时创建的?其创建的条件(时机)有两个:
- 当第一条带key的消息发送来后,系统发现没有indexFile,此时会创建第一个indexFile文件
- 当一个indexFile中挂载的index索引单元数量超出2000w个时,会创建新的indexFile。当带key的消息发送到来后,系统会找到最新的indexFile,并从其indexHeader的最后4字节中读取到 indexCount。若 (indexCount >=2000 w) 时,会创建新的indexFile
由于可以推算出,一个indexFile的最大大小是: ((40+500w*4+2000w*20)) 字节
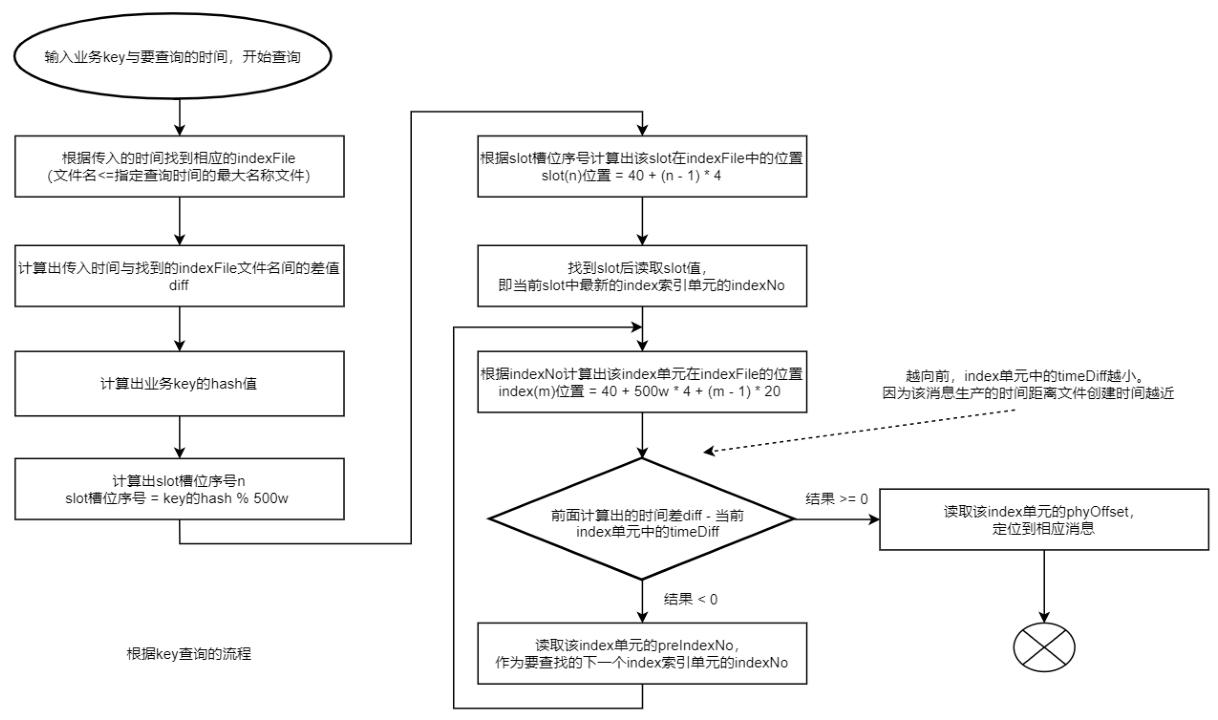
4、查询流程
当消费者通过业务key来查询相应的消息时,其需要经过一个相对较复杂的查询流程。不过,在分析查 询流程之前,首先要清楚几个定位计算式子:

40为indexFile中indexHeader的字节数
500w * 4 是所有slots所占的字节数
具体查询流程如下:
四、消息的消费
消费者从Broker中获取消息的方式有两种:pull拉取方式和push推动方式。消费者组对于消息消费的模 式又分为两种:集群消费Clustering和广播消费Broadcasting。
1、获取消费类型
拉取式消费
Consumer主动从Broker中拉取消息,主动权由Consumer控制。一旦获取了批量消息,就会启动消费过程。不过,该方式的实时性较弱,即Broker中有了新的消息时消费者并不能及时发现并消费。
由于拉取时间间隔是由用户指定的,所以在设置该间隔时需要注意平稳:间隔太短,空请求比 例会增加;间隔太长,消息的实时性太差
推送式消费
该模式下Broker收到数据后会主动推送给Consumer。该获取方式一般实时性较高。
该获取方式是典型的发布-订阅模式,即Consumer向其关联的Queue注册了监听器,一旦发现有新的 消息到来就会触发回调的执行,回调方法是Consumer去Queue中拉取消息。而这些都是基于Consumer 与Broker间的长连接的。长连接的维护是需要消耗系统资源的。
对比
- pull:需要应用去实现对关联Queue的遍历,实时性差;但便于应用控制消息的拉取
- push:封装了对关联Queue的遍历,实时性强,但会占用较多的系统资源
2、消费模式
广播消费
广播消费模式下,相同Consumer Group的每个Consumer实例都接收同一个Topic的全量消息。即每条消息都会被发送到Consumer Group中的每个Consumer。
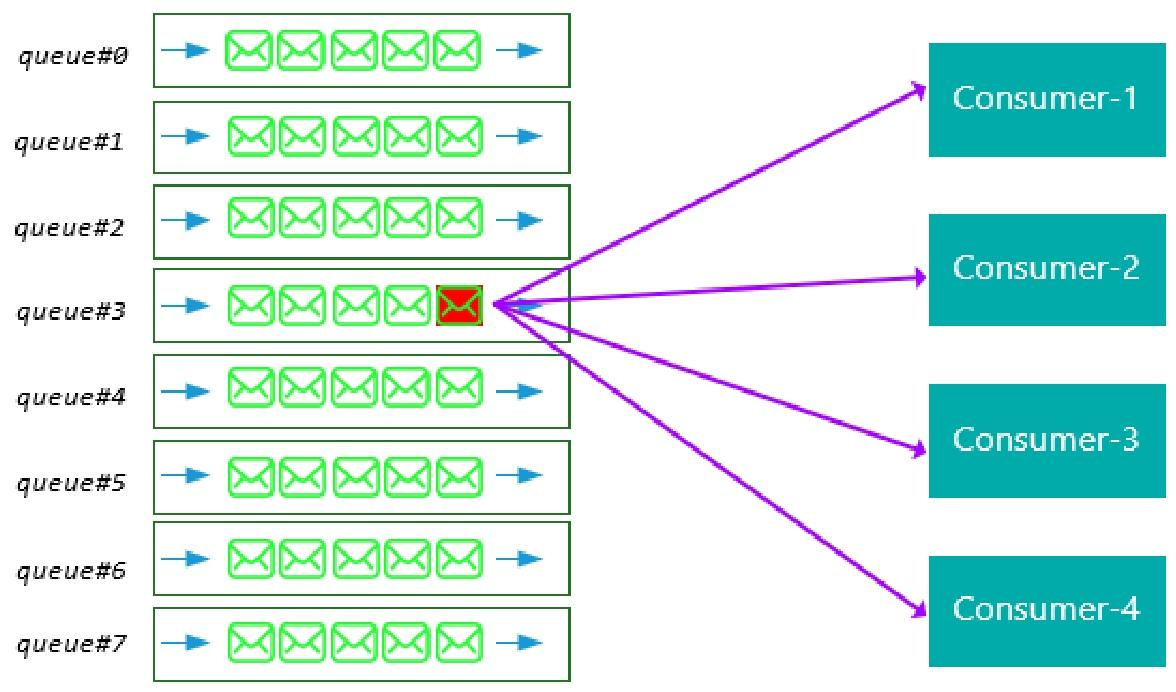
集群消费
集群消费模式下,相同Consumer Group的每个Consumer实例平均分摊同一个Topic的消息。即每条消息只会被发送到Consumer Group中的某个Consumer。
消息进度保存
广播模式:
消费进度保存在consumer端。因为广播模式下consumer group中每个consumer都会消费所有消息,但它们的消费进度是不同。所以consumer各自保存各自的消费进度。
集群模式:
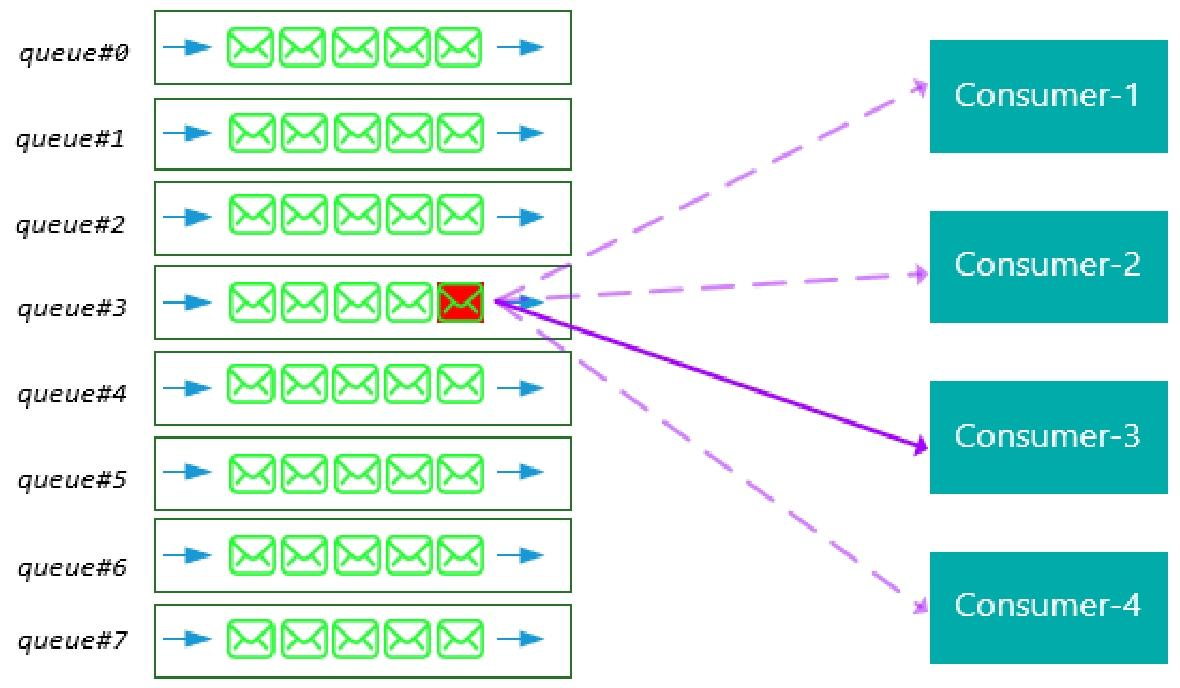
消费进度保存在broker中。consumer group中的所有consumer共同消费同一个Topic中的消息,同一条消息只会被消费一次。消费进度会参与到了消费的负载均衡中,故消费进度是需要共享的。下图是broker中存放的各个Topic的各个Queue的消费进度。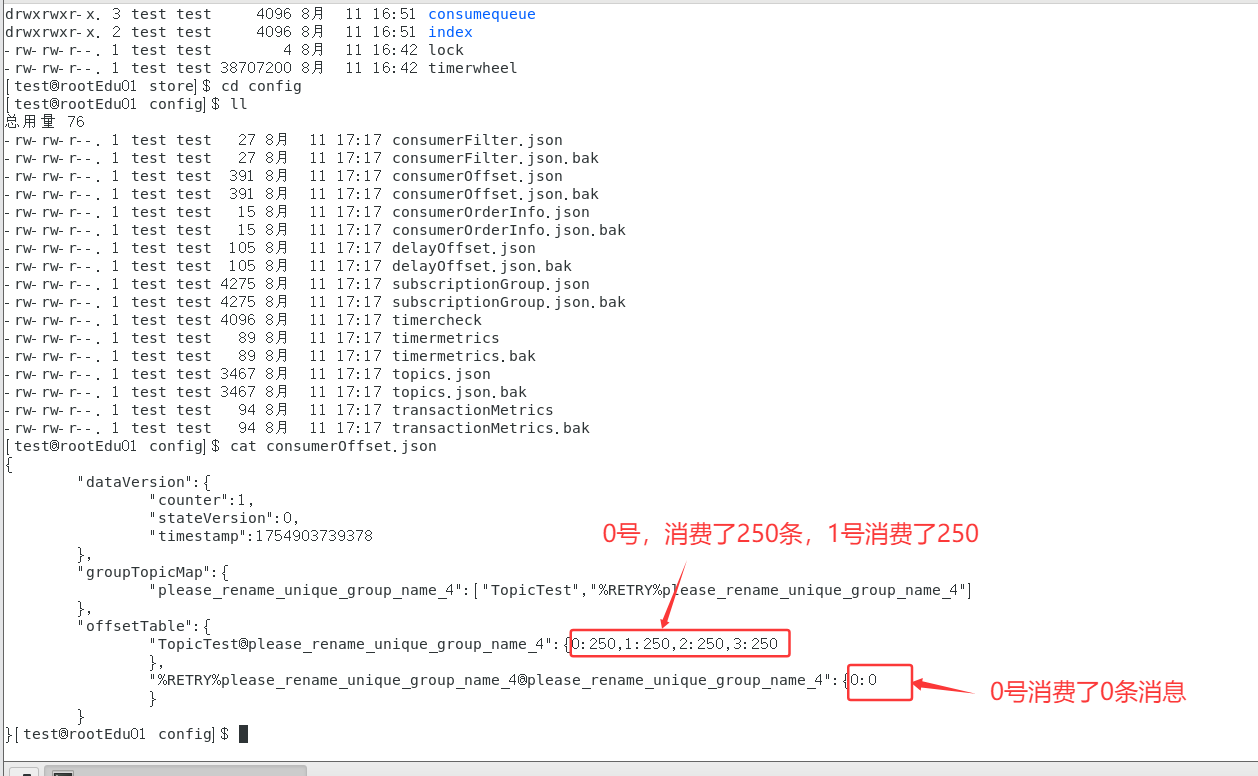
下次就接着往下消费
3、Rebalance机制
Rebalance机制讨论的前提是:集群消费。
什么是Rebalance
Rebalance即再均衡,指的是,将⼀个Topic下的多个Queue在同⼀个Consumer Group中的多个 Consumer间进行重新分配的过程。
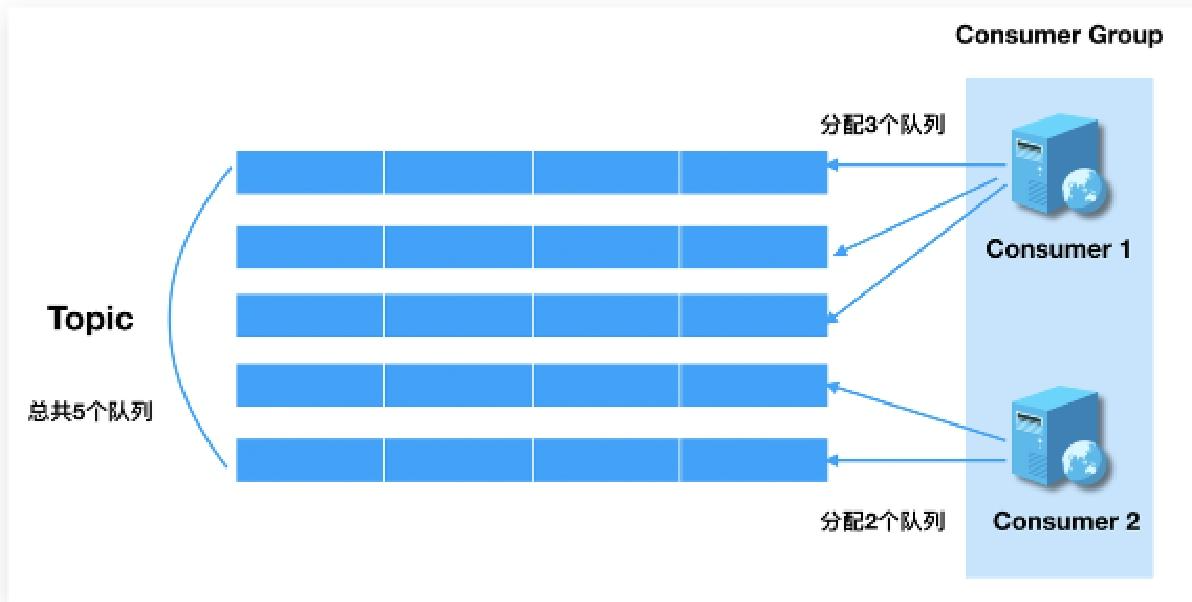
Rebalance机制的本意是为了提升消息的并行消费能力。例如,⼀个Topic下5个队列,在只有1个消费者的情况下,这个消费者将负责消费这5个队列的消息。如果此时我们增加⼀个消费者,那么就可以给 其中⼀个消费者分配2个队列,给另⼀个分配3个队列,从而提升消息的并行消费能力。
Rebalance限制
由于⼀个队列最多分配给⼀个消费者,因此当某个消费者组下的消费者实例数量大于队列的数量时,多余的消费者实例将分配不到任何队列。
Rebalance危害
Rebalance的在提升消费能力的同时,也带来一些问题:
消费暂停:
在只有一个Consumer时,其负责消费所有队列;在新增了一个Consumer后会触发 Rebalance的发生。此时原Consumer就需要暂停部分队列的消费,等到这些队列分配给新的Consumer 后,这些暂停消费的队列才能继续被消费。
消费重复:
Consumer 在消费新分配给自己的队列时,必须接着之前Consumer 提交的消费进度的offset 继续消费。然而默认情况下,offset是异步提交的,这个异步性导致提交到Broker的offset与Consumer 实际消费的消息并不一致。这个不一致的差值就是可能会重复消费的消息。
同步提交:consumer提交了其消费完毕的一批消息的offset给broker后,需要等待broker的成功 ACK。当收到ACK后,consumer才会继续获取并消费下一批消息。在等待ACK期间,consumer 是阻塞的。
异步提交:consumer提交了其消费完毕的一批消息的offset给broker后,
不需要等待broker的成功ACK。consumer可以直接获取并消费下一批消息。对于一次性读取消息的数量,需要根据具体业务场景选择一个相对均衡的是很有必要的。因为 数量过大,系统性能提升了,但产生重复消费的消息数量可能会增加;数量过小,系统性能会 下降,但被重复消费的消息数量可能会减少。
消费突刺:
由于Rebalance可能导致重复消费,如果需要重复消费的消息过多,或者因为Rebalance暂停 时间过长从而导致积压了部分消息。那么有可能会导致在Rebalance结束之后瞬间需要消费很多消息。
Rebalance产生的原因
导致Rebalance产生的原因,无非就两个:消费者所订阅Topic的Queue数量发生变化,或消费者组中消费者的数量发生变化。
Queue数量发生变化的场景:
Broker扩容或缩容
Broker升级运维
Broker与NameServer间的网络异常
Queue扩容或缩容
消费者数量发生变化的场景:
Consumer Group扩容或缩容
Consumer升级运维
Consumer与NameServer间网络异常
Rebalance过程
在Broker中维护着多个Map集合,这些集合中动态存放着当前Topic中Queue的信息、Consumer Group 中Consumer实例的信息。一旦发现消费者所订阅的Queue数量发生变化,或消费者组中消费者的数量 发生变化,立即向Consumer Group中的每个实例发出Rebalance通知。
TopicConågManager:key是topic名称,value是TopicConåg。TopicConåg中维护着该Topic中所
有Queue的数据。
ConsumerManager:key是Consumser Group Id,value是ConsumerGroupInfo。
ConsumerGroupInfo中维护着该Group中所有Consumer实例数据。
ConsumerOffsetManager:key为Topic与订阅该Topic的Group的组合,即topic@group,value是一个内层Map。内层Map的key为QueueId,内层Map的value为该Queue的消费进度offset。
Consumer实例在接收到通知后会采用Queue分配算法自己获取到相应的Queue,即由Consumer实例 自主进行Rebalance。
与Kafka对比
在Kafka中,一旦发现出现了Rebalance条件,Broker会调用Group Coordinator来完成Rebalance。 Coordinator是Broker中的一个进程。Coordinator会在Consumer Group中选出一个Group Leader。由 这个Leader根据自己本身组情况完成Partition分区的再分配。这个再分配结果会上报给Coordinator, 并由Coordinator同步给Group中的所有Consumer实例。
Kafka中的Rebalance是由Consumer Leader完成的。而RocketMQ中的Rebalance是由每个Consumer自 身完成的,Group中不存在Leader。
4、Queue分配算法
一个Topic中的Queue只能由Consumer Group中的一个Consumer进行消费,而一个Consumer可以同时消费多个Queue中的消息。那么Queue与Consumer间的配对关系是如何确定的,即Queue要分配给哪个Consumer进行消费,也是有算法策略的。常见的有四种策略。这些策略是通过在创建Consumer时的构造器传进去的。
平均分配策略
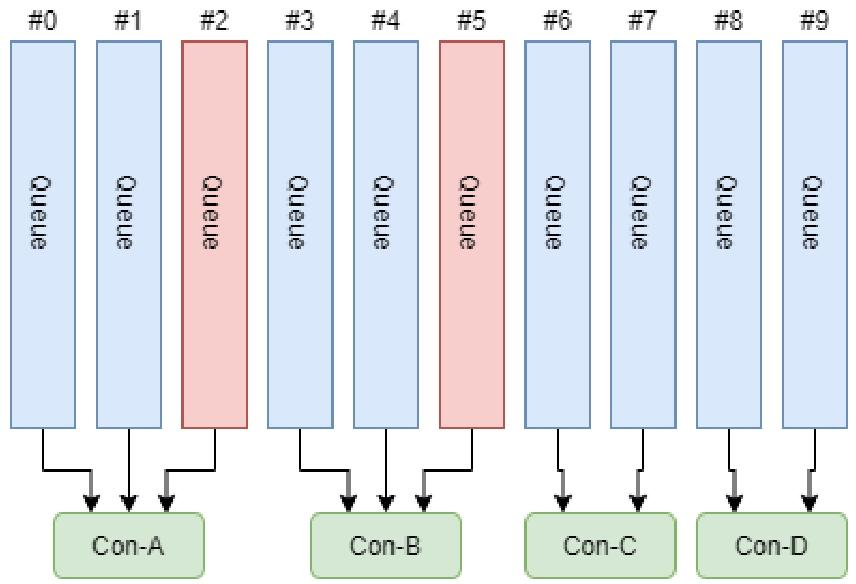
该算法是要根据avg = QueueCount / ConsumerCount的计算结果进行分配的。如果能够整除, 则按顺序将avg个Queue逐个分配Consumer;如果不能整除,则将多余出的Queue按照Consumer顺序逐个分配。
该算法即,先计算好每个Consumer应该分得几个Queue,然后再依次将这些数量的Queue逐个分配个Consumer。
环形平均策略
环形平均算法是指,根据消费者的顺序,依次在由queue队列组成的环形图中逐个分配。
该算法不用事先计算每个Consumer需要分配几个Queue,直接一个一个分即可。
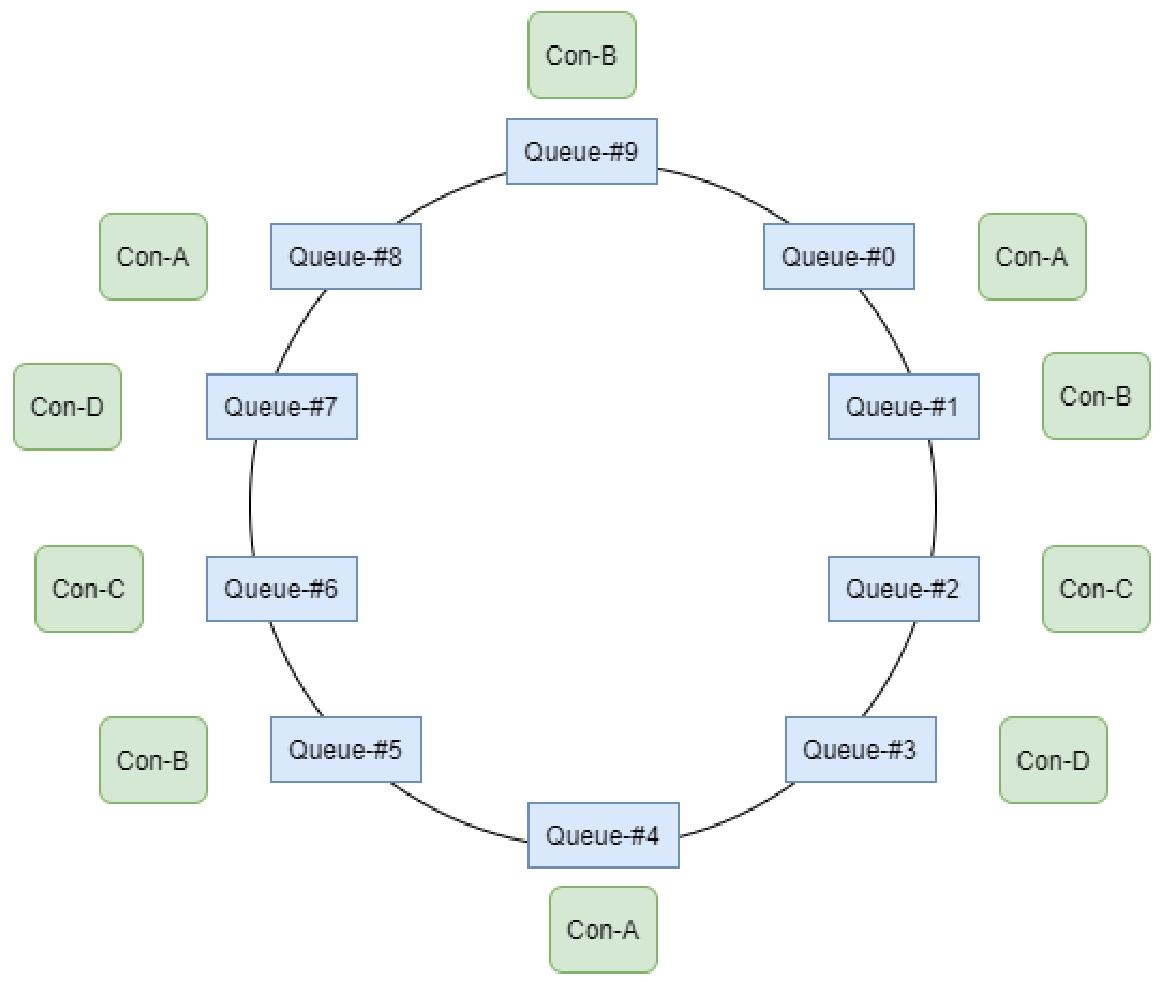
一致性hash策略
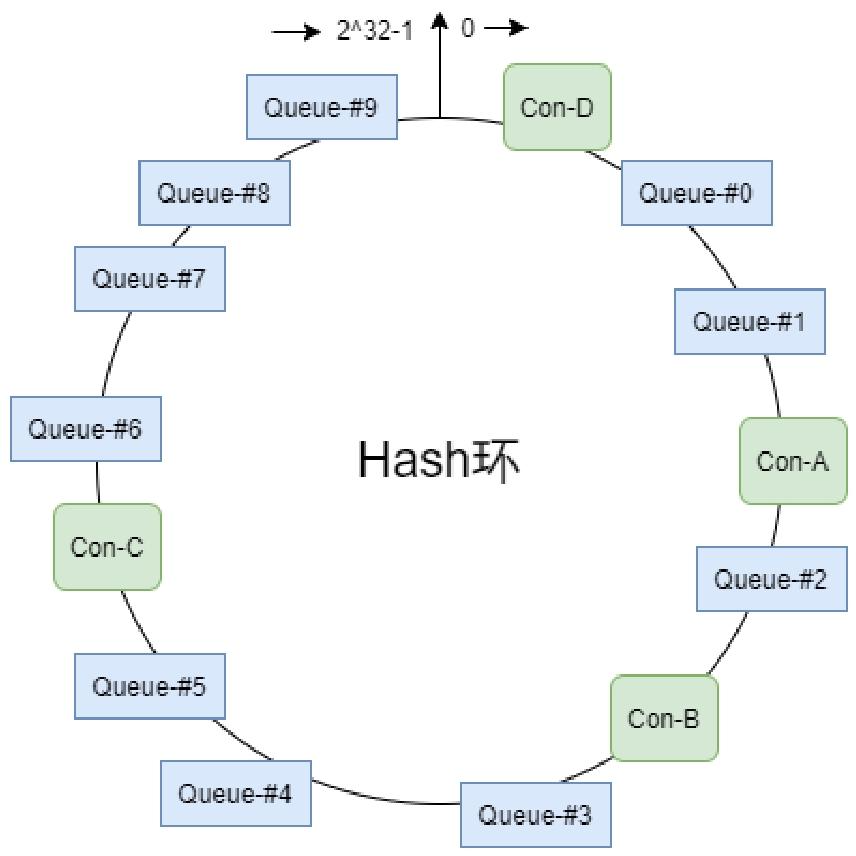
该算法会将consumer的hash值作为Node节点存放到hash环上,然后将queue的hash值也放到hash环上,通过顺时针方向,距离queue最近的那个consumer就是该queue要分配的consumer。
该算法存在的问题:分配不均。
同机房策略
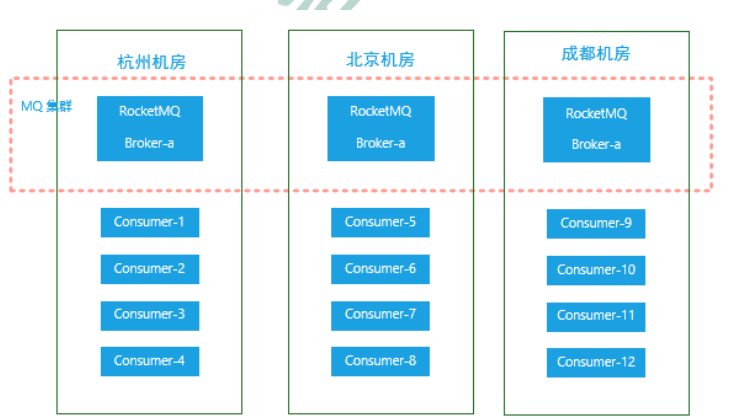
该算法会根据queue的部署机房位置和consumer的位置,过滤出当前consumer相同机房的queue。然 后按照平均分配策略或环形平均策略对同机房queue进行分配。如果没有同机房queue,则按照平均分配策略或环形平均策略对所有queue进行分配。
对比
一致性hash算法存在的问题:
两种平均分配策略的分配效率较高,一致性hash策略的较低。因为一致性hash算法较复杂。另外,一致性hash策略分配的结果也很大可能上存在不平均的情况。
一致性hash算法存在的意义:
其可以有效减少由于消费者组扩容或缩容所带来的大量的Rebalance。
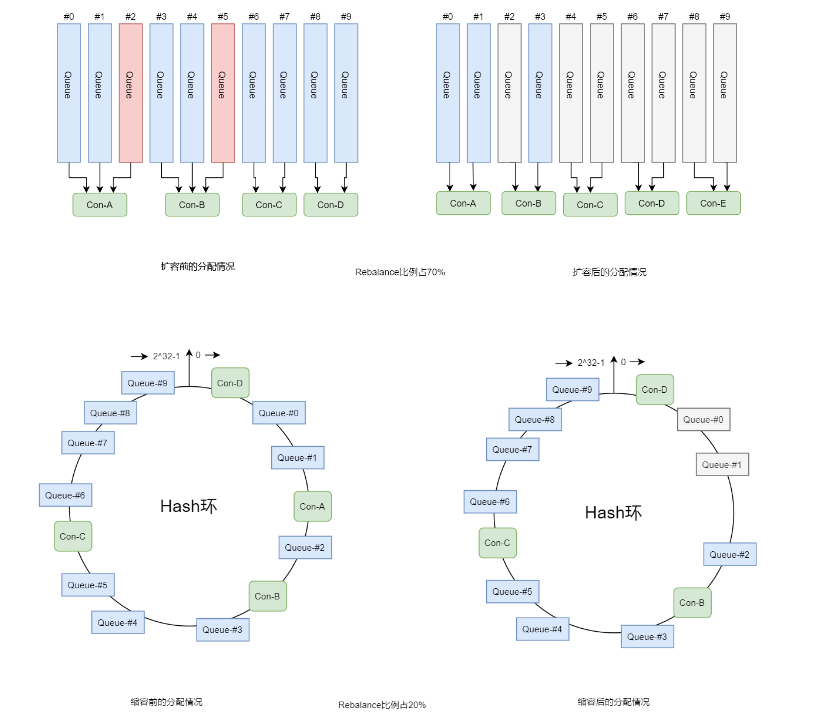
一致性hash算法的应用场景:
Consumer数量变化较频繁的场景。
5、至少一次原则
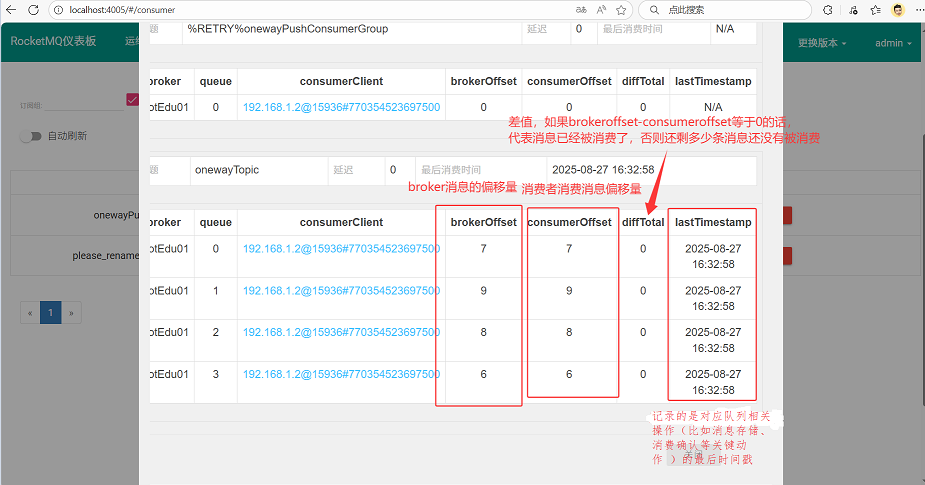
RocketMQ有一个原则:每条消息必须要被成功消费一次。
那么什么是成功消费呢?Consumer在消费完消息后会向其消费进度记录器提交其消费消息的offset, offset被成功记录到记录器中,那么这条消费就被成功消费了。
什么是消费进度记录器?
对于广播消费模式来说,Consumer本身就是消费进度记录器。
对于集群消费模式来说,Broker是消费进度记录器。
五、订阅关系的一致性
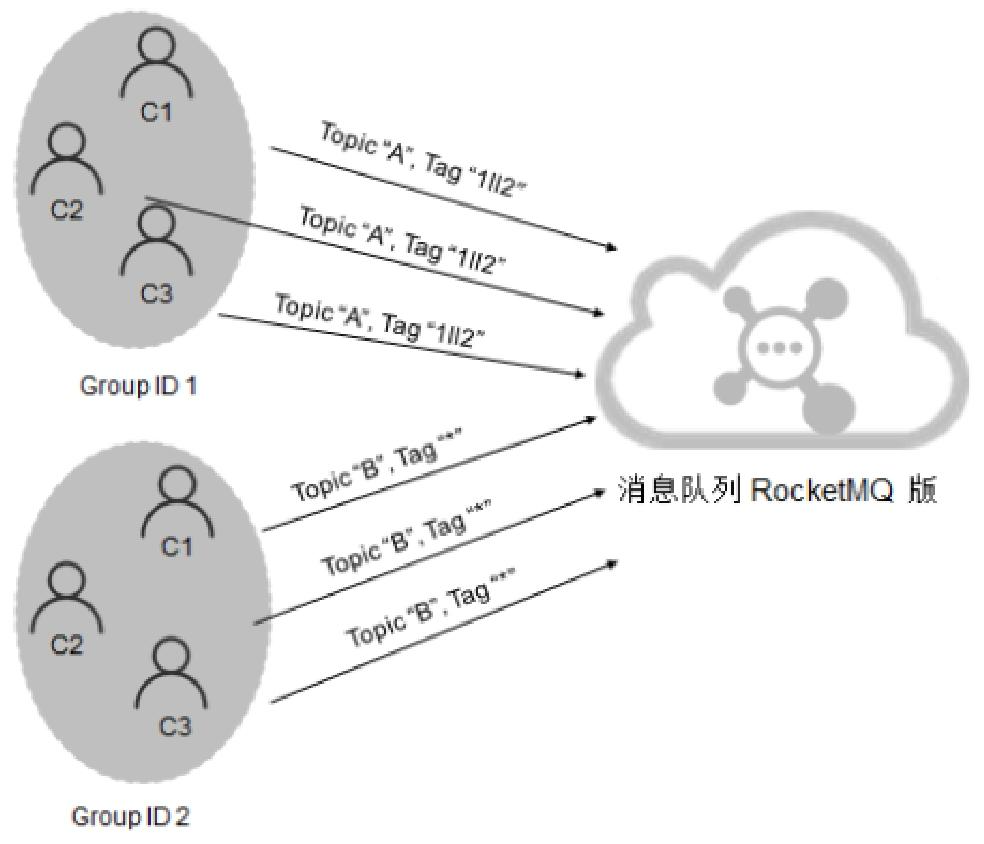
订阅关系的一致性指的是,同一个消费者组(Group ID相同)下所有Consumer实例所订阅的Topic与 Tag及对消息的处理逻辑必须完全一致。否则,消息消费的逻辑就会混乱,甚至导致消息丢失。
1、正确订阅关系
多个消费者组订阅了多个Topic,并且每个消费者组里的多个消费者实例的订阅关系保持了一致。
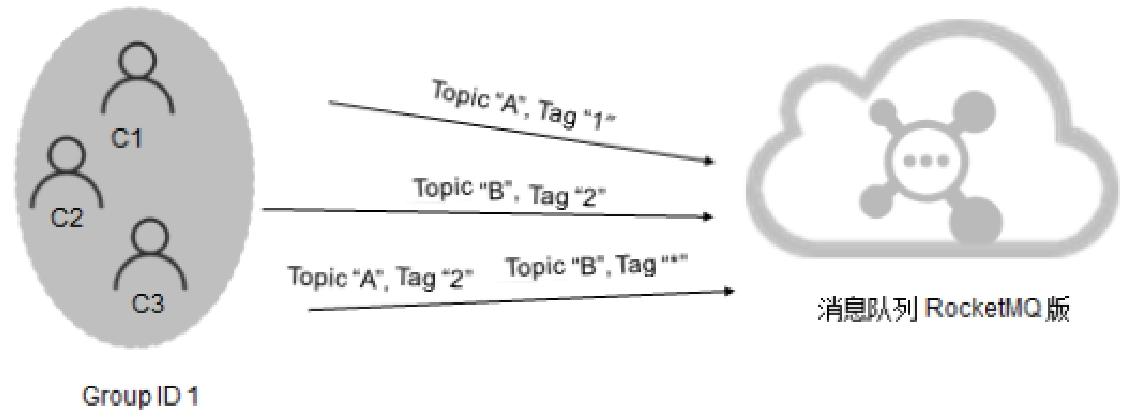
2、错误订阅关系
一个消费者组订阅了多个Topic,但是该消费者组里的多个Consumer实例的订阅关系并没有保持一致。
订阅了不同Topic
该例中的错误在于,同一个消费者组中的两个Consumer实例订阅了不同的Topic。
Consumer实例1-1:(订阅了topic为jodie_test_A,tag为所有的消息)
Properties properties = new Properties(); |
Consumer实例1-2:(订阅了topic为jodie_test_B,tag为所有的消息)
Properties properties = new Properties(); |
订阅了不同Tag
该例中的错误在于,同一个消费者组中的两个Consumer订阅了相同Topic的不同Tag。
Consumer实例2-1:(订阅了topic为jodie_test_A,tag为TagA的消息)
Properties properties = new Properties(); |
Consumer实例2-2:(订阅了topic为jodie_test_A,tag为所有的消息)
Properties properties = new Properties(); |
订阅了不同数量的Topic
该例中的错误在于,同一个消费者组中的两个Consumer订阅了不同数量的Topic。
Consumer实例3-1:(该Consumer订阅了两个Topic)
Properties properties = new Properties(); |
Consumer实例3-2:(该Consumer订阅了一个Topic)
Properties properties = new Properties(); |
六、offset管理
这里的 offset 指的是 Consumer 的消费进度 offset
消费进度offset是用来记录每个Queue的不同消费组的消费进度的。根据消费进度记录器的不同,可以 分为两种模式:本地模式和远程模式。
1、offset本地管理模式
当消费模式为广播消费时,offset使用本地模式存储。因为每条消息会被所有的消费者消费,每个消费者管理自己的消费进度,各个消费者之间不存在消费进度的交集。
Consumer在广播消费模式下offset相关数据以json的形式持久化到Consumer本地磁盘文件中,默认文 件路径为当前用户主目录下的.rocketmq_offsets/${clientId}/${group}/Offsets.json(这是个隐藏目录)。 其中${clientId}为当前消费者id,默认为ip@DEFAULT;${group}为消费者组名称。
2、offset远程管理模式
当消费模式为集群消费时,offset使用远程模式管理。因为所有Cosnumer实例对消息采用的是均衡消费,所有Consumer共享Queue的消费进度。
Consumer在集群消费模式下offset相关数据以json的形式持久化到Broker磁盘文件中,文件路径为当前 用户主目录下的store/config/consumerOffset.json。
Broker启动时会加载这个文件,并写入到一个双层Map(ConsumerOffsetManager)。外层map的key 为topic@group,value为内层map。内层map的key为queueId,value为offset。当发生Rebalance时, 新的Consumer会从该Map中获取到相应的数据来继续消费。
集群模式下offset采用远程管理模式,主要是为了保证Rebalance机制!如果采用本地模式存储,当宕机的时候,无法持续消费(无法找到消费进度)。
3、offset用途
消费者是如何从最开始持续消费消息的?消费者要消费的第一条消息的起始位置是用户自己通过 consumer.setConsumeFromWhere()方法指定的。
在Consumer启动后,其要消费的第一条消息的起始位置常用的有三种,这三种位置可以通过枚举类型常量设置。这个枚举类型为ConsumeFromWhere。
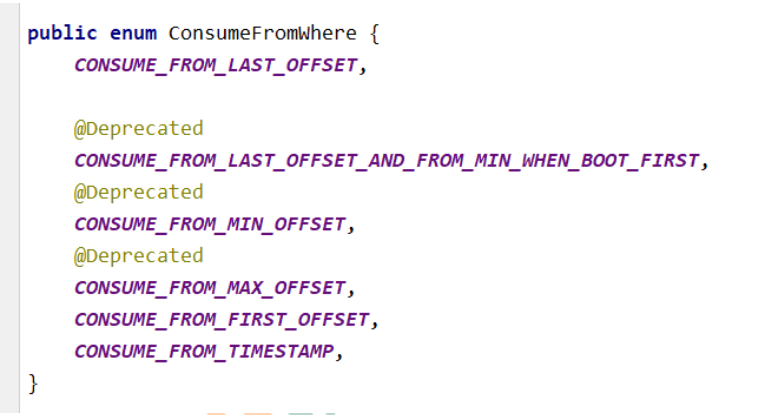
CONSUME_FROM_LAST_OFFSET :从 queue 的当前最后一条消息开始消费
CONSUME_FROM_FIRST_OFFSET :从 queue 的第一条消息开始消费
CONSUME_FROM_TIMESTAMP :从指定的具体时间戳位置的消息开始消费。这个具体时间戳 是通过另外一个语句指定的 。
consumer.setConsumeTimestamp(“20210701080000”) yyyyMMddHHmmss
当消费完一批消息后,Consumer会提交其消费进度offset给Broker,Broker在收到消费进度后会将其更 新到那个双层Map(ConsumerOffsetManager)及consumerOffset.json文件中,然后向该Consumer进 行ACK,而ACK内容中包含三项数据:当前消费队列的最小offset(minOffset)、最大 offset(maxOffset)、及下次消费的起始offset(nextBeginOffset)。
4、重试队列
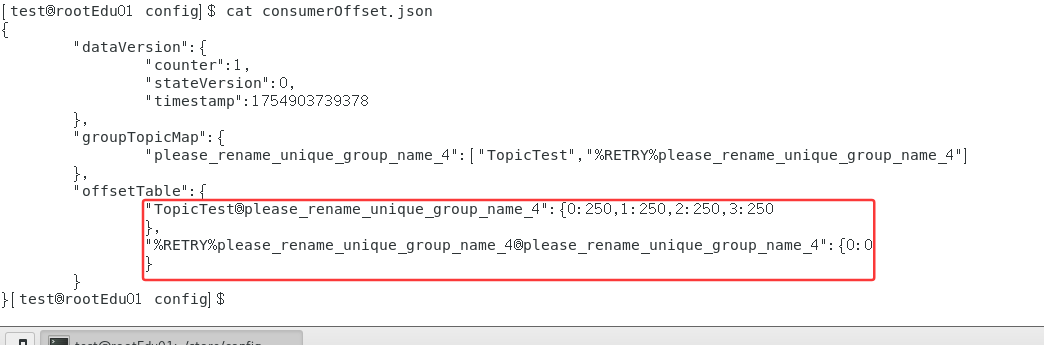
当rocketMQ对消息的消费出现异常时,会将发生异常的消息的offset提交到Broker中的重试队列。系统 在发生消息消费异常时会为当前的topic@group创建一个重试队列,该队列以%RETRY%开头,到达重试时间后进行消费重试。
5、offset的同步提交与异步提交
集群消费模式下,Consumer消费完消息后会向Broker提交消费进度offset,其提交方式分为两种:
同步提交:消费者在消费完一批消息后会向broker提交这些消息的offset,然后等待broker的成功响 应。若在等待超时之前收到了成功响应,则继续读取下一批消息进行消费(从ACK中获取 nextBeginOffset)。若没有收到响应,则会重新提交,直到获取到响应。而在这个等待过程中,消费者是阻塞的。其严重影响了消费者的吞吐量。异步提交:消费者在消费完一批消息后向broker提交offset,但无需等待Broker的成功响应,可以继续读取并消费下一批消息。这种方式增加了消费者的吞吐量。但需要注意,broker在收到提交的offset后,还是会向消费者进行响应的。可能还没有收到ACK,此时Consumer会从Broker中直接获取 nextBeginOffset。
七、消费幂等
1、什么是消费幂等
当出现消费者对某条消息重复消费的情况时,重复消费的结果与消费一次的结果是相同的,并且多次消费并未对业务系统产生任何负面影响,那么这个消费过程就是消费幂等的。
消费幂等:是应对重复消费的解决方案,指消费者在多次处理同一条消息时,最终产生的业务结果是一致的,不会因为重复处理而导致数据异常(如重复下单、金额重复计算等)。
幂等:若某操作执行多次与执行一次对系统产生的影响是相同的,则称该操作是幂等的。
在互联网应用中,尤其在网络不稳定的情况下,消息很有可能会出现重复发送或重复消费。如果重复的 消息可能会影响业务处理,那么就应该对消息做幂等处理。
2、消息重复的场景分析
什么情况下可能会出现消息被重复消费呢?最常见的有以下三种情况:
发送时消息重复
当一条消息已被成功发送到Broker并完成持久化,此时出现了网络闪断,从而导致Broker对Producer应 答失败。 如果此时Producer意识到消息发送失败并尝试再次发送消息,此时Broker中就可能会出现两 条内容相同并且Message ID也相同的消息,那么后续Consumer就一定会消费两次该消息。
消费时消息重复
消息已投递到Consumer并完成业务处理,当Consumer给Broker反馈应答时网络闪断,Broker没有接收到消费成功响应。为了保证消息至少被消费一次的原则,Broker将在网络恢复后再次尝试投递之前已 被处理过的消息。此时消费者就会收到与之前处理过的内容相同、Message ID也相同的消息。
Rebalance时消息重复
当Consumer Group中的Consumer数量发生变化时,或其订阅的Topic的Queue数量发生变化时,会触 发Rebalance,此时Consumer可能会收到曾经被消费过的消息。
3、通用解决方案
两要素
幂等解决方案的设计中涉及到两项要素:
- 幂等令牌,与唯一性处理。只要充分利用好这两要素,就可以 设计出好的幂等解决方案。 幂等令牌:是生产者和消费者两者中的既定协议,通常指具备唯⼀业务标识的字符串。例如,订 单号、流水号。一般由Producer随着消息一同发送来的。
- 唯一性处理:服务端通过采用⼀定的算法策略,保证同⼀个业务逻辑不会被重复执行成功多次。 例如,对同一笔订单的多次支付操作,只会成功一次。
解决方案
对于常见的系统,幂等性操作的通用性解决方案是:
- 首先通过缓存去重。在缓存中如果已经存在了某幂等令牌,则说明本次操作是重复性操作;若缓 存没有命中,则进入下一步。
- 在唯一性处理之前,先在数据库中查询幂等令牌作为索引的数据是否存在。若存在,则说明本次 操作为重复性操作;若不存在,则进入下一步。
- 在同一事务中完成三项操作:唯一性处理后,将幂等令牌写入到缓存,并将幂等令牌作为唯一索 引的数据写入到DB中。
第 1 步已经判断过是否是重复性操作了,为什么第 2 步还要再次判断?能够进入第 2 步,说明已经 不是重复操作了,第 2 次判断是否重复?
当然不重复。一般缓存中的数据是具有有效期的。缓存中数据的有效期一旦过期,就是发生缓 存穿透,使请求直接就到达了 DBMS
解决方案举例
以支付场景为例:
- 当支付请求到达后,首先从 Redis 缓存中获取支付流水号(key)对应的 value。若value不空,则说明本次支付是重复操作,业务系统直接返回调用侧,重复支付标识;若value为空,则进入下一步操作
- 到DBMS中根据支付流水号查询是否存在相应实例。若存在,则说明本次支付是重复操作,业务系统直接返回调用侧,重复支付标识;若不存在,则说明本次操作是首次操作,进入下一步完成唯一性处理
- 在分布式事务中完成三项操作:
- 完成支付任务
- 将当前
支付流水号作为key,任意字符串作为value,通过set(key, value, expireTime)将数据写入到Redis缓存 - 将当前
支付流水号作为主键,与其它相关数据共同写入到DBMS
4、消费幂等的实现
消费幂等的解决方案很简单:为消息指定不会重复的唯一标识。因为Message ID有可能出现重复的情况,所以真正安全的幂等处理,不建议以Message ID作为处理依据。最好的方式是以业务唯一标识作为 幂等处理的关键依据,而业务的唯一标识可以通过消息Key设置。
以支付场景为例,可以将消息的Key设置为订单号,作为幂等处理的依据。具体代码示例如下:
Message message = new Message(); |
消费者收到消息时可以根据消息的Key即订单号来实现消费幂等:
consumer.registerMessageListener(new MessageListenerConcurrently() { |
RocketMQ能够保证消息不丢失,但不能保证消息不重复。
- RocketMQ出现重复消息的概率很低
- 如果要做消息的去重的话,肯定会消耗系统的大量资源、性能
- 为了避免不让重复消息出现,去消耗大量的系统资源。是得不偿失的!所以从RocketMQ消息去重的方法,交给业务处理
八、消息堆积与消费延迟
1、概念
消息处理流程中,如果Consumer的消费速度跟不上Producer的发送速度,MQ中未处理的消息会越来 越多(进的多,出的少),这部分消息就被称为堆积消息。消息出现堆积进而会造成消息的消费延迟。 以下场景需要重点关注消息堆积和消费延迟问题:
- 业务系统上下游能力不匹配造成的持续堆积,且无法自行恢复。
- 业务系统对消息的消费实时性要求较高,即使是短暂的堆积造成的消费延迟也无法接受。
2、产生原因分析
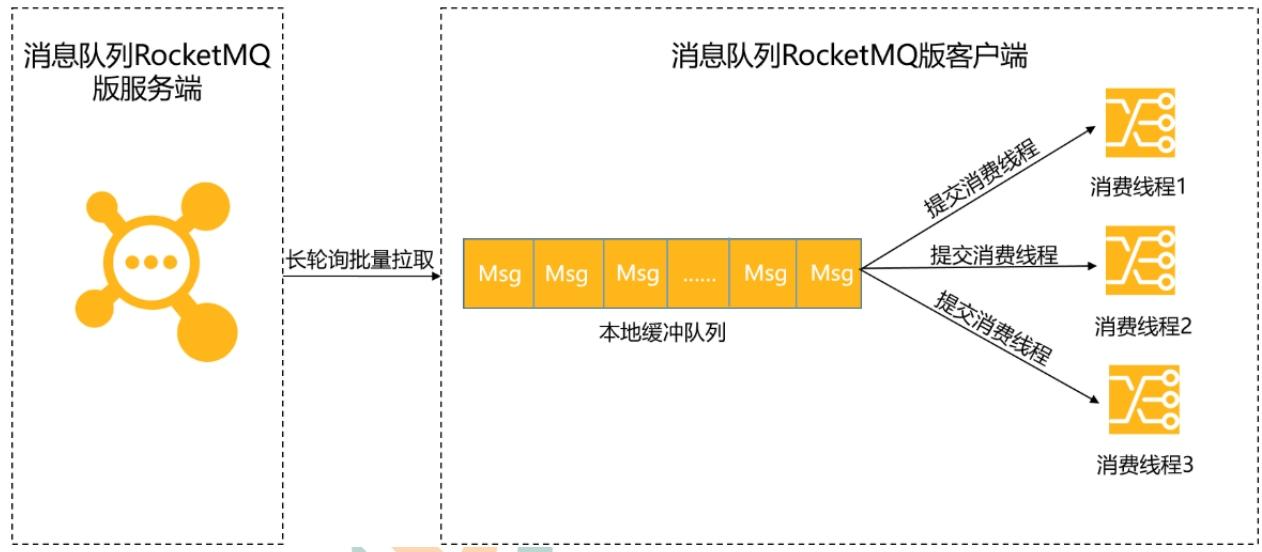
Consumer使用长轮询Pull模式消费消息时,分为以下两个阶段:
消息拉取:
Consumer通过长轮询Pull模式批量拉取的方式从服务端获取消息,将拉取到的消息缓存到本地缓冲队 列中。对于拉取式消费,在内网环境下会有很高的吞吐量,所以这一阶段一般不会成为消息堆积的瓶颈。
一个单线程单分区的低规格主机(Consumer,4C 8G(服务器4核8G)),其可达到几万的TPS。如果是多个分区多个线程,则可以轻松达到几十万的TPS。
TPS(Transactions Per Second,每秒事务数) 是衡量其消息处理能力与系统性能的核心指标,具体指 RocketMQ 集群或单个节点在每秒内能够成功处理的消息相关操作总数。
TPS就是提交一个拉取请求,然后获取到拉取消息的时间称为TPS。TPS也是一秒里面包含多少个RT(request time)
消息消费
Consumer将本地缓存的消息提交到消费线程中,使用业务消费逻辑对消息进行处理,处理完毕后获取 到一个结果。这是真正的消息消费过程。此时Consumer的消费能力就完全依赖于消息的消费耗时和消费并发度(有多少个消费并发线程)了。如果业务处理逻辑复杂等原因,导致处理单条消息的耗时较长,则整体的消息吞吐量肯定不会高,此时就会导致Consumer本地缓冲队列达到上限,停止从服务端拉取消息。
结论
消息堆积的主要瓶颈在于客户端的消费能力,而消费能力由消费耗时和消费并发度决定。注意,消费 耗时的优先级要高于消费并发度。即在保证了消费耗时的合理性前提下,再考虑消费并发度问题。
3、消费耗时
影响消息处理时长的主要因素是代码逻辑。而代码逻辑中可能会影响处理时长代码,主要有两种类型: CPU内部计算型代码和外部I/O操作型代码。
通常情况下代码中如果没有复杂的递归和循环的话,内部计算耗时相对外部I/O操作来说几乎可以忽略。所以外部IO型代码是影响消息处理时长的主要症结所在。
外部 IO 操作型代码举例:
- 读写外部数据库,例如对远程 MySQL 的访问
- 读写外部缓存系统,例如对远程 Redis 的访问
- 下游系统调用,例如 Dubbo 的 RPC 远程调用, Spring Cloud 的对下游系统的 Http 接口调用
关于下游系统调用逻辑需要进行提前梳理,掌握每个调用操作预期的耗时,这样做是为了能够 判断消费逻辑中 IO 操作的耗时是否合理。通常消息堆积是由于下游系统出现了
服务异常或达到了DBMS容量限制,导致消费耗时增加。
服务异常,并不仅仅是系统中出现的类似于 500 这样的代码错误,而可能是更加隐蔽的问题。例如,网络带宽问题。
达到了 DBMS 容量限制,其也会引发消息的消费耗时增加。
4、消费并发度
一般情况下,消费者端的消费并发度由单节点线程数和节点数量共同决定,其值为单节点线程数*节点数量。不过,通常需要优先调整单节点的线程数,若单机硬件资源达到了上限,则需要通过横向扩展来提高消费并发度。
单节点线程数,即单个 Consumer 所包含的线程数量
节点数量,即 Consumer Group 所包含的 Consumer 数量
对于普通消息、延时消息及事务消息,并发度计算都是
单节点线程数 * 节点数量。但对于顺序 消息则是不同的。顺序消息的消费并发度等于Topic的Queue分区数量。
- 全局顺序消息:该类型消息的 Topic 只有一个 Queue 分区。其可以保证该 Topic 的所有消息被 顺序消费。为了保证这个全局顺序性, Consumer Group 中在同一时刻只能有一个 Consumer 的一 个线程进行消费。所以其并发度为 1 。
- 分区顺序消息:该类型消息的 Topic 有多个 Queue 分区。其仅可以保证该 Topic 的每个 Queue 分区中的消息被顺序消费,不能保证整个 Topic 中消息的顺序消费。为了保证这个分区顺序性, 每个 Queue 分区中的消息在 Consumer Group 中的同一时刻只能有一个 Consumer 的一个线程进行 消费。即,在同一时刻最多会出现多个 Queue 分区有多个 Consumer 的多个线程并行消费。所以 其并发度为 Topic 的分区数量。
5、单机线程数计算
对于一台主机中线程池中线程数的设置需要谨慎,不能盲目直接调大线程数,设置过大的线程数反而会 带来大量的线程切换的开销。理想环境下单节点的最优线程数计算模型为:C *(T1 + T2)/ T1。
- C:CPU内核数
- T1:CPU内部逻辑计算耗时
- T2:外部IO操作耗时
最优线程数 = C * ( T1 + T2 ) / T1 = C * T1/T1 + C * T2/T1 = C + C * T2/T1
注意,该计算出的数值是理想状态下的理论数据,在生产环境中,不建议直接使用。而是根据 当前环境,先设置一个比该值小的数值然后观察其压测效果,然后再根据效果逐步调大线程 数,直至找到在该环境中性能最佳时的值。
6、如何避免
为了避免在业务使用时出现非预期的消息堆积和消费延迟问题,需要在前期设计阶段对整个业务逻辑进 行完善的排查和梳理。其中最重要的就是梳理消息的消费耗时和设置消息消费的并发度。
梳理消息的消费耗时
通过压测获取消息的消费耗时,并对耗时较高的操作的代码逻辑进行分析。梳理消息的消费耗时需要关注以下信息:
- 消息消费逻辑的计算复杂度是否过高,代码是否存在无限循环和递归等缺陷。
- 消息消费逻辑中的I/O操作是否是必须的,能否用本地缓存等方案规避。
- 消费逻辑中的复杂耗时的操作是否可以做异步化处理。如果可以,是否会造成逻辑错乱。
设置消费并发度
对于消息消费并发度的计算,可以通过以下两步实施:
逐步调大单个Consumer节点的线程数,并观测节点的系统指标,得到单个节点最优的消费线程数 和消息吞吐量。
根据上下游链路的流量峰值计算出需要设置的节点数
节点数 = 流量峰值 / 单个节点消息吞吐量
九、消息的清理
消息被消费过后会被清理掉吗?不会的。
消息是被顺序存储在commitlog文件的,且消息大小不定长,所以消息的清理是不可能以消息为单位进 行清理的,而是以commitlog文件为单位进行清理的。否则会急剧下降清理效率,并实现逻辑复杂。
commitlog文件存在一个过期时间,默认为72小时,即三天。除了用户手动清理外,在以下情况下也 会被自动清理,无论文件中的消息是否被消费过:
- 文件过期,且到达
清理时间点(默认为凌晨4点)后,自动清理过期文件 - 文件过期,且磁盘空间占用率已达
过期清理警戒线(默认75%)后,无论是否达到清理时间点, 都会自动清理过期文件 - 磁盘占用率达到
清理警戒线(默认85%)后,开始按照设定好的规则清理文件,无论是否过期。 默认会从最老的文件开始清理 - 磁盘占用率达到
系统危险警戒线(默认90%)后,Broker将拒绝消息写入
需要注意以下几点:
- 对于 RocketMQ 系统来说,删除一个 1G 大小的文件,是一个压力巨大的 IO 操作。在删除过程 中,系统性能会骤然下降。所以,其默认清理时间点为凌晨 4 点,访问量最小的时间。也正因如此,我们要保障磁盘空间的空闲率,不要使系统出现在其它时间点删除 commitlog 文件的情况。
- 官方建议 RocketMQ 服务的 Linux 文件系统采用 ext4 。因为对于文件删除操作, ext4 要比 ext3 性能更好
ext3 和 ext4 的区别
ext3 和 ext4 是 Linux 系统中常用的文件系统,ext4 是 ext3 的改进版本,提供了更高的性能、更大的存储容量以及更多功能。以下是两者的主要区别和特点:
性能与效率 ext4 引入了 extents(扩展)机制,用连续的数据块表示文件存储位置,减少了碎片化问题,提高了大文件操作效率。而 ext3 使用间接块映射,处理大文件时效率较低。 ext4 支持 延迟分配,在数据写入缓存后再分配磁盘块,从而优化写入性能并减少碎片化。
存储容量 ext3 最大支持 16TB 的分区和 2TB 的单个文件,而 ext4 支持高达 1EB(1,048,576TB)的分区和 16TB 的单个文件,适合大数据场景。
子目录数量 ext3 支持最多 32,000 个子目录,而 ext4 支持无限数量的子目录,极大提升了目录管理能力。
文件系统检查(fsck) ext4 的文件系统检查速度显著提升,因为它可以跳过未使用的 inode,而 ext3 需要检查所有 inode。
日志功能 ext4 提供了日志校验功能,可以检测日志数据是否损坏,并将 ext3 的两阶段日志机制简化为单阶段,提高了安全性和性能。此外,ext4 还支持关闭日志功能,以满足某些高性能需求。
碎片整理 尽管 ext4 的多块分配和延迟分配减少了碎片化,但仍支持 在线碎片整理,并提供工具(如 e4defrag)进行碎片清理,而 ext3 不支持此功能。
inode 改进 ext4 默认 inode 大小为 256 字节(ext3 为 128 字节),支持更多扩展属性,如纳秒级时间戳和 inode 版本。此外,ext4 支持 inode 保留和快速扩展属性。
兼容性 ext4 向后兼容 ext3,可以直接将 ext3 文件系统挂载为 ext4,无需重新格式化磁盘。但反向兼容性有限,升级时需谨慎规划。
适用场景 ext4 更适合需要处理大文件、高性能和大容量存储的场景,而 ext3 由于其长期稳定性,仍适用于对兼容性和可靠性要求较高的旧系统。
综上所述,ext4 在性能、容量和功能上全面优于 ext3,但在某些兼容性和稳定性要求较高的场景下,ext3 仍然是一个可靠的选择。
flowchart TD |
第4章RocketMQ应用
一、普通消息
1、消息发送分类
Producer对于消息的发送方式也有多种选择,不同的方式会产生不同的系统效果。
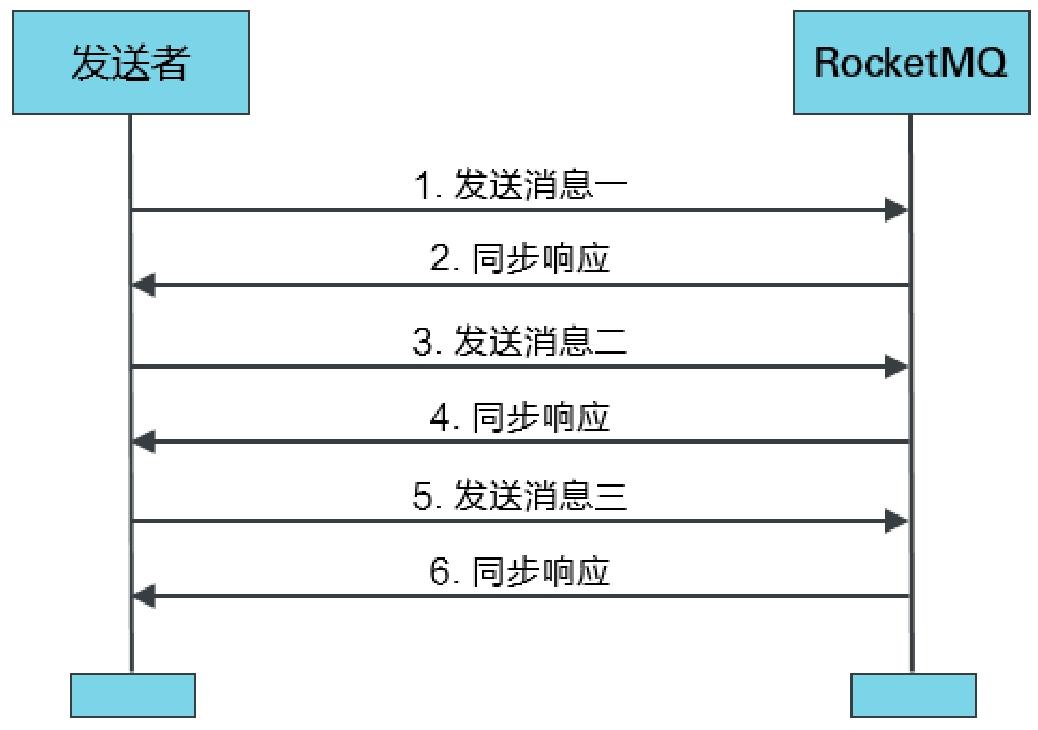
同步发送消息
同步发送消息是指,Producer发出⼀条消息后,会在收到MQ返回的ACK之后才发下⼀条消息。该方式 的消息可靠性最高,但消息发送效率太低。
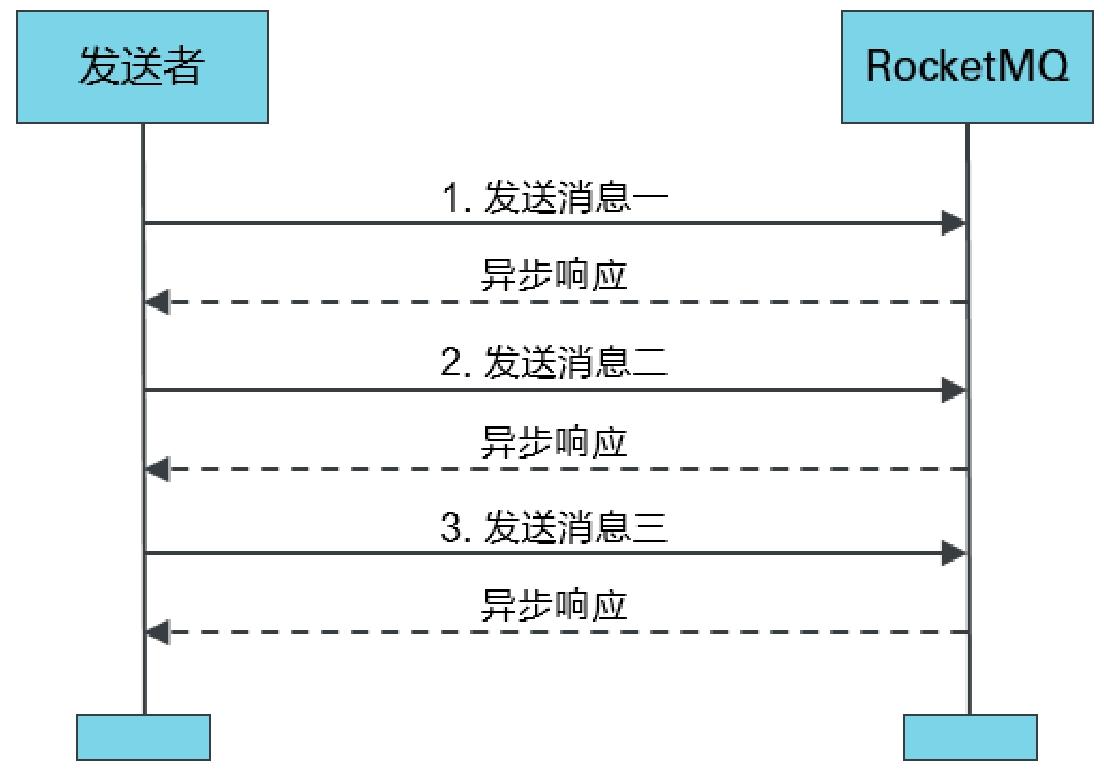
异步发送消息
异步发送消息是指,Producer发出消息后无需等待MQ返回ACK,直接发送下⼀条消息。该方式的消息 可靠性可以得到保障,消息发送效率也可以。
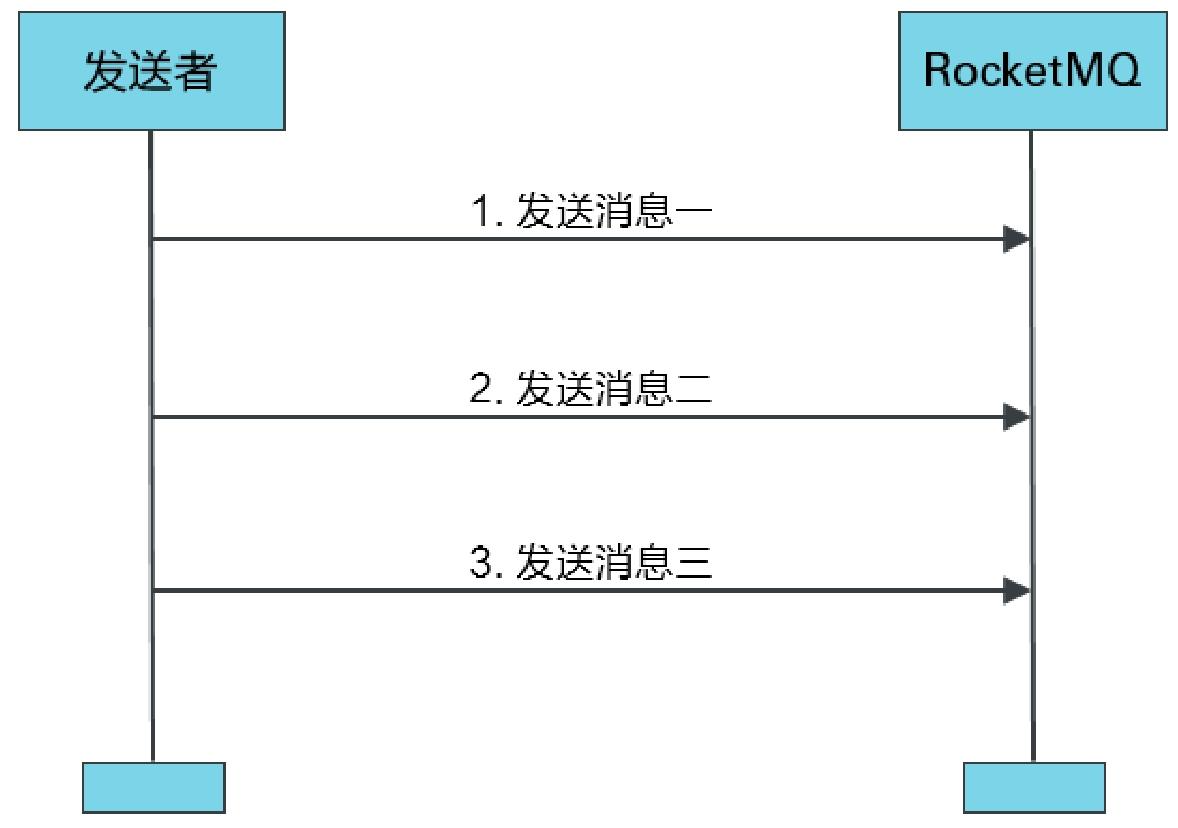
单向发送消息
单向发送消息是指,Producer仅负责发送消息,不等待、不处理MQ的ACK。该发送方式时MQ也不返 回ACK。该方式的消息发送效率最高,但消息可靠性较差。
2、代码举例
创建工程
创建一个Maven的Java工程rocketmq-demo。
导入依赖
导入rocketmq的client依赖。
<properties> |
注意:rocketmq版本号要和下载的rocketmq版本号一致!
定义同步消息发送生产者
package com.lazy.rocketmqtest.sync; |
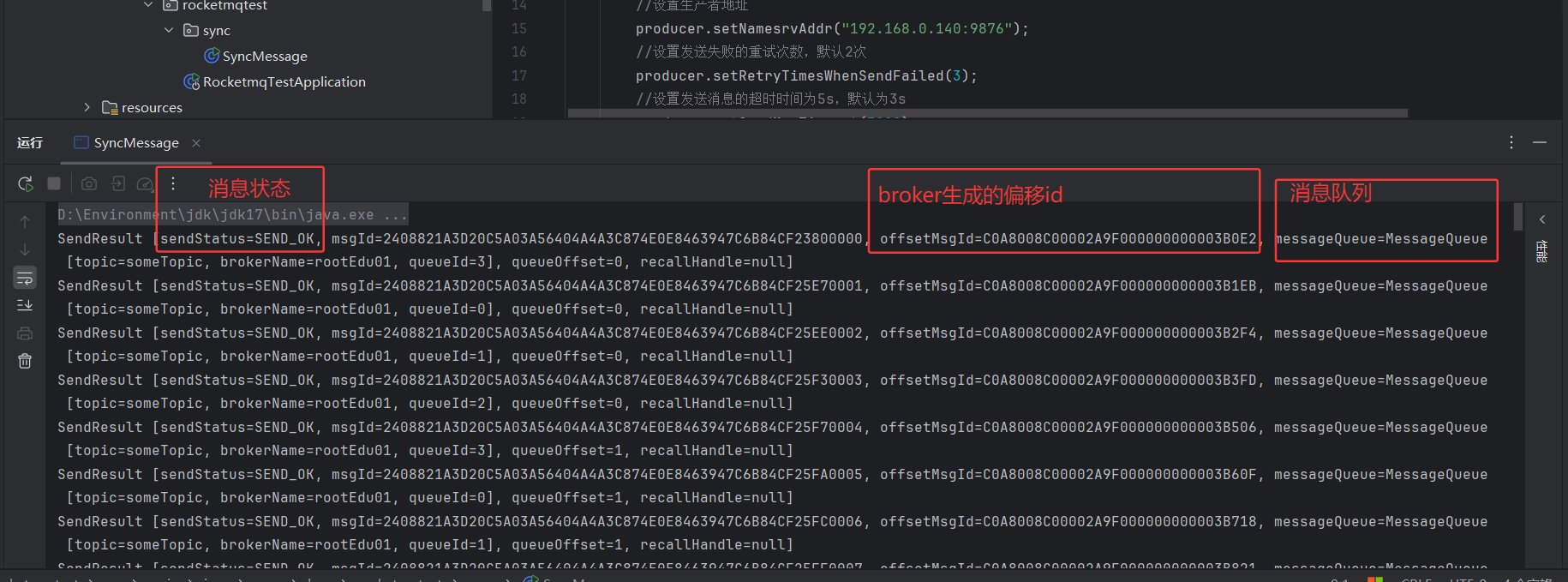
// 消息发送的状态 |
 ‘
‘
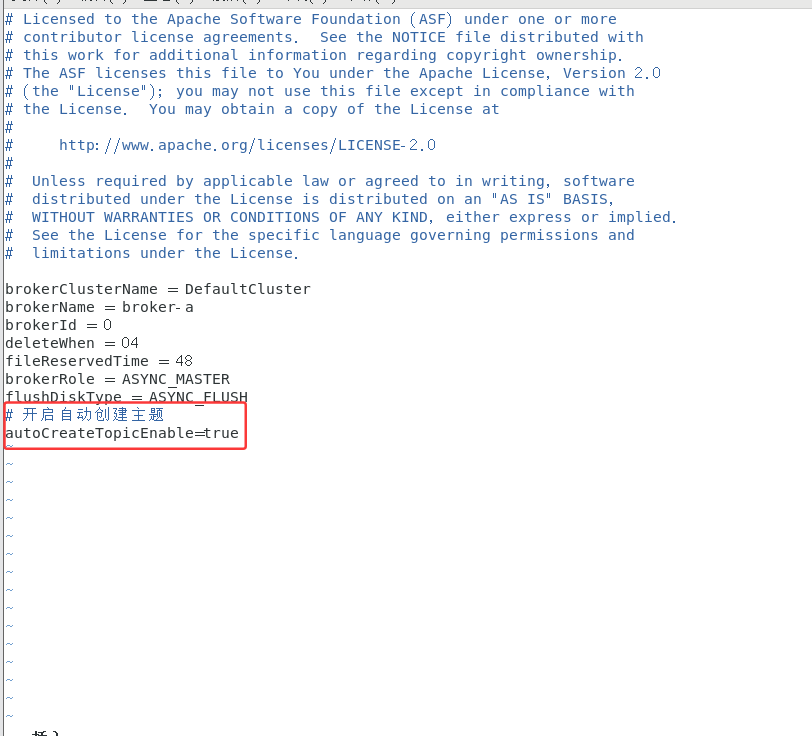
如果报

就去conf/broker.conf添加
定义异步消息发送生产者
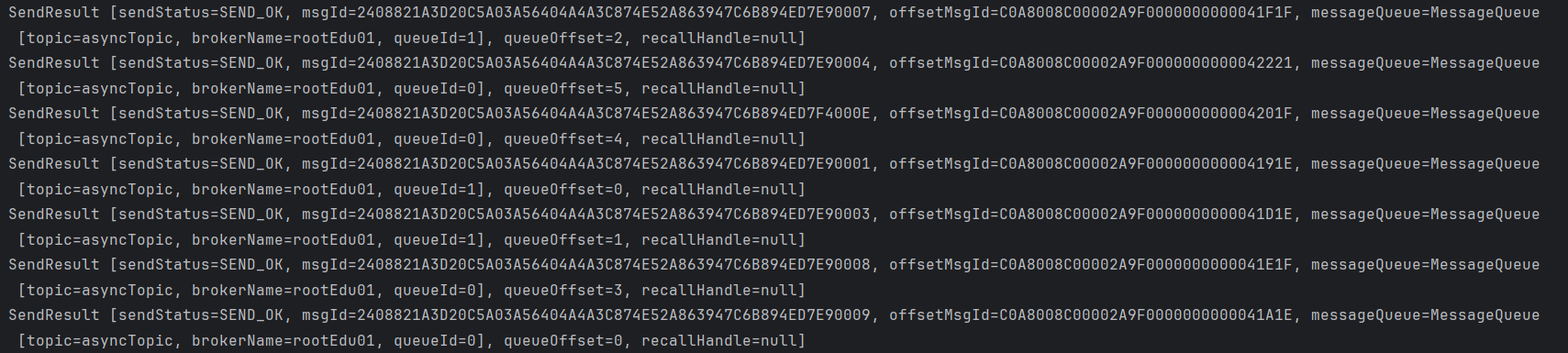
package com.lazy.rocketmqtest.sync; |
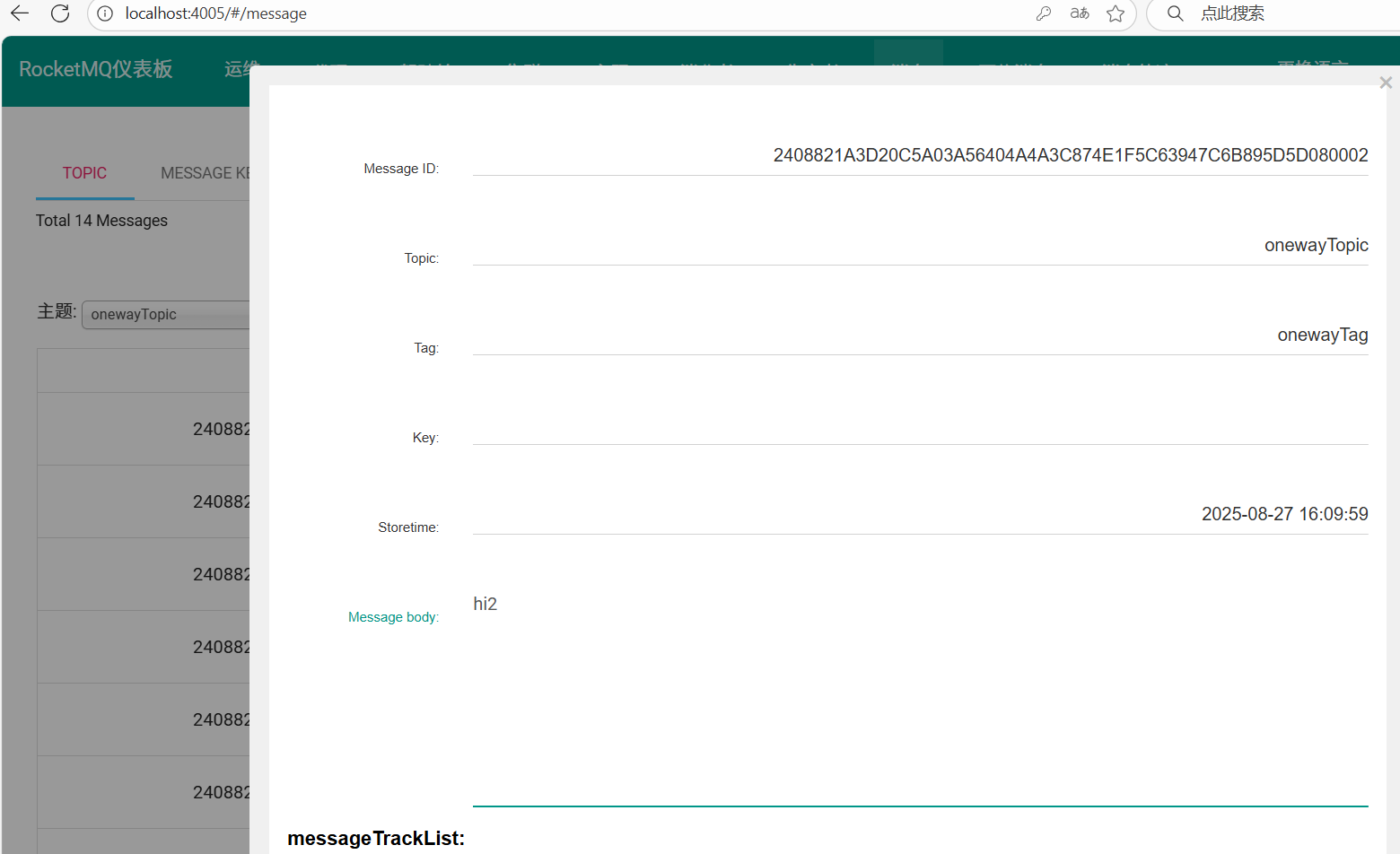
定义单向消息发送生产者
package com.lazy.rocketmqtest.sync; |
定义消息消费者
生产者
package com.lazy.rocketmqtest.sync; |
package com.lazy.rocketmqtest.sync; |

- **
brokerName**:消息所在的 Broker 名称 ,Broker 是 RocketMQ 中负责存储和转发消息的组件。 - **
queueId**:消息所在队列的 ID 。RocketMQ 中的 Topic 可以划分为多个队列,用于并行处理消息,提高消息处理性能。 - **
storeSize**:消息存储的大小,单位是字节,这里消息大小为258字节。 - **
queueOffset**:消息在队列中的偏移量,标识消息在该队列中的位置。 - **
commitLogOffset**:消息在 CommitLog 中的偏移量,CommitLog 是 RocketMQ 中用于顺序存储所有消息的文件,通过这个偏移量可以快速定位到消息在物理存储中的位置。
消息时间戳相关
- **
bornTimestamp**:消息产生的时间戳(毫秒级),对应消息从生产者发出的时间。 - **
bornHost**:消息产生的主机地址和端口。 - **
storeTimestamp**:消息存储到 Broker 的时间戳(毫秒级),记录了消息被存储到 Broker 的时间点。 - **
storeHost**:消息存储到的 Broker 主机地址和端口 ,表示消息存储在这个 Broker 上。
消息标识相关
- **
msgId**:消息的唯一 ID,在整个 RocketMQ 集群中用于唯一标识一条消息。 - **
bodyCRC**:消息体的 CRC(循环冗余校验)值,用于校验消息体在传输和存储过程中是否发生错误。 - **
preparedTransactionOffset**:在事务消息场景下,用于记录 Prepared 状态消息对应的偏移量,这里值为0,说明不是事务消息或者事务相关状态暂未体现。
消息消费相关
- **
reconsumeTimes**:消息被重新消费的次数,值为0,表示该消息还未被重新消费过。当消费者消费消息失败,可能会触发消息的重新消费。
消息基础属性相关(Message 内部类)
**
topic**:消息所属的主题。**
flag**:消息的标志位,用于表示消息的一些特性,比如是否是事务消息等,这里值为0,表示没有特殊标记。properties:消息的属性集合,包含了很多自定义或系统生成的属性,例如:
- **
CONSUME_START_TIME**:消息开始被消费的时间戳(毫秒级)。 - **
MSG_REGION**:消息所属区域 。 - **
UNIQ_KEY**:消息的唯一键,可用于去重等场景。 - **
CLUSTER**:消息所属的集群名称 。 MIN_OFFSET和 **MAX_OFFSET**:队列的最小和最大偏移量,用于消费进度管理等。- **
TAGS**:消息的标签,用于对消息进行更细粒度的分类 。 WAIT和TRACE_ON等:自定义的一些标志属性。
- **
**
body**:消息体内容,这里是字节数组[104, 105, 53],实际应用中需要根据编码规则(如 UTF-8 等)转换为对应的文本或其他格式数据,这里对应的 ASCII 字符是hi5。**
transactionId**:事务消息的 ID,这里为null,说明不是事务消息或者事务 ID 未设置 。
二、顺序消息
1、什么是顺序消息
顺序消息指的是,严格按照消息的发送顺序进行消费的消息(FIFO)。
默认情况下生产者会把消息以Round Robin轮询方式发送到不同的Queue分区队列;而消费消息时会从 多个Queue上拉取消息,这种情况下的发送和消费是不能保证顺序的。如果将消息仅发送到同一个 Queue中,消费时也只从这个Queue上拉取消息,就严格保证了消息的顺序性。
2、为什么需要顺序消息
例如,现在有TOPIC ORDER_STATUS(订单状态),其下有4个Queue队列,该Topic中的不同消息用于 描述当前订单的不同状态。假设订单有状态:未支付、已支付、发货中、发货成功、发货失败
根据以上订单状态,生产者从时序上可以生成如下几个消息:
订单T0000001:未支付 –> 订单T0000001:已支付 –> 订单T0000001:发货中 –> 订单 T0000001:发货失败
消息发送到MQ中之后,Queue的选择如果采用轮询策略,消息在MQ的存储可能如下:
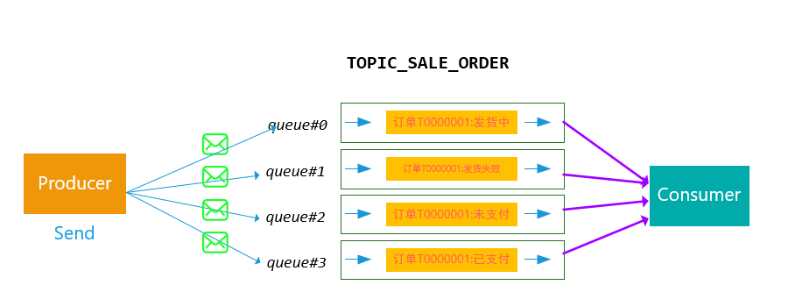
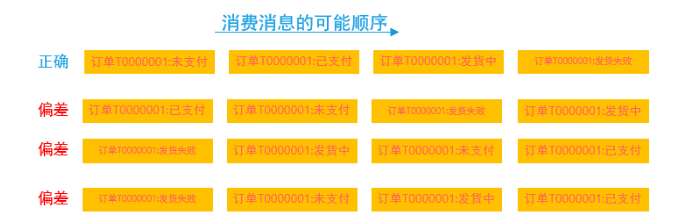
这种情况下,我们希望Consumer消费消息的顺序和我们发送是一致的,然而上述MQ的投递和消费方 式,我们无法保证顺序是正确的。对于顺序异常的消息,Consumer即使设置有一定的状态容错,也不 能完全处理好这么多种随机出现组合情况。
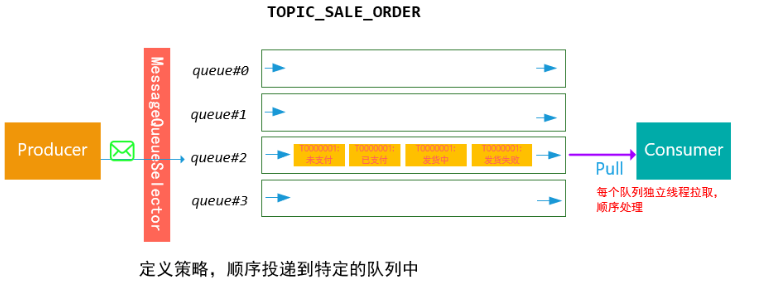
基于上述的情况,可以设计如下方案:对于相同订单号的消息,通过一定的策略,将其放置在一个 Queue中,然后消费者再采用一定的策略(例如,一个线程独立处理一个queue,保证处理消息的顺序 性),能够保证消费的顺序性。
3、有序性分类
根据有序范围的不同,RocketMQ可以严格地保证两种消息的有序性:分区有序与全局有序。
全局有序
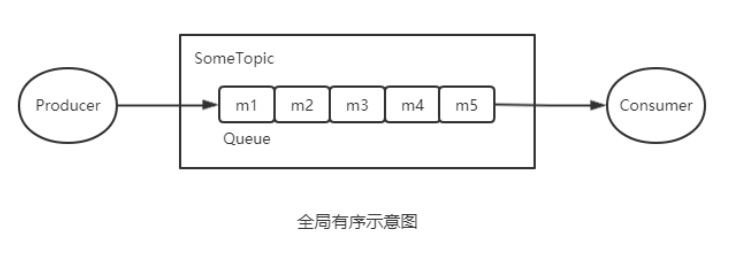
当发送和消费参与的Queue只有一个时所保证的有序是整个Topic中消息的顺序, 称为全局有序。
在创建 Topic 时指定 Queue 的数量。有三种指定方式:
- 在代码中创建 Producer 时,可以指定其自动创建的 Topic 的 Queue 数量
- 在 RocketMQ 可视化控制台中手动创建 Topic 时指定 Queue 数量
- 使用 mqadmin 命令手动创建 Topic 时指定 Queue 数量
分区有序
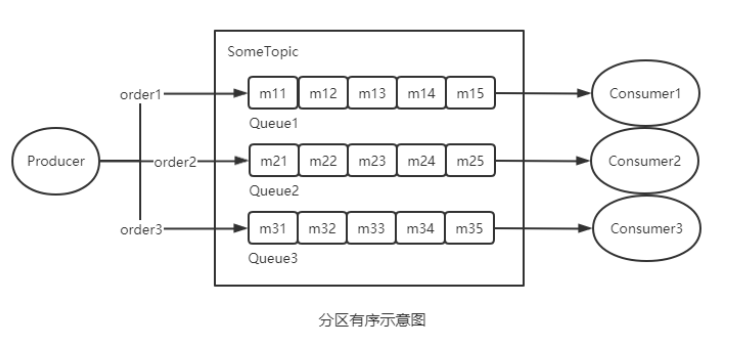
如果有多个Queue参与,其仅可保证在该Queue分区队列上的消息顺序,则称为分区有序。
如何实现 Queue 的选择?在定义 Producer 时我们可以指定消息队列选择器,而这个选择器是我们 自己实现了 MessageQueueSelector 接口定义的。
在定义选择器的选择算法时,一般需要使用选择 key 。这个选择 key 可以是消息 key 也可以是其它 数据。但无论谁做选择 key ,都不能重复,都是唯一的。
一般性的选择算法是,让选择 key (或其 hash 值)与该 Topic 所包含的 Queue 的数量取模,其结果即为选择出的 Queue 的 QueueId 。
取模算法存在一个问题:不同选择 key 与 Queue 数量取模结果可能会是相同的,即不同选择 key 的 消息可能会出现在相同的 Queue ,即同一个 Consuemr 可能会消费到不同选择 key 的消息。这个问题如何解决?一般性的作法是,从消息中获取到选择 key ,对其进行判断。若是当前 Consumer 需要消费的消息,则直接消费,否则,什么也不做。这种做法要求选择 key 要能够随着消息一起被Consumer 获取到。此时使用消息 key 作为选择 key 是比较好的做法。
以上做法会不会出现如下新的问题呢?不属于那个 Consumer 的消息被拉取走了,那么应该消费 该消息的 Consumer 是否还能再消费该消息呢?同一个 Queue 中的消息不可能被同一个 Group 中的不同 Consumer 同时消费。所以,消费同一个 Queue 的不同选择 key 的消息的 Consumer一定属于不同的 Group 。而不同的 Group 中的 Consumer 间的消费是相互隔离的,互不影响的。
4、代码举例
package com.lazy.rocketmqtest.order; |
三、延时消息
1、什么是延时消息
当消息写入到Broker后,在指定的时长后才可被消费处理的消息,称为延时消息。
采用RocketMQ的延时消息可以实现定时任务的功能,而无需使用定时器。典型的应用场景是,电商交易中超时未支付关闭订单的场景,12306平台订票超时未支付取消订票的场景。
在电商平台中,订单创建时会发送一条延迟消息。这条消息将会在 30 分钟后投递给后台业务系 统( Consumer ),后台业务系统收到该消息后会判断对应的订单是否已经完成支付。如果未完 成,则取消订单,将商品再次放回到库存;如果完成支付,则忽略。
在 12306 平台中,车票预订成功后就会发送一条延迟消息。这条消息将会在 45 分钟后投递给后台 业务系统( Consumer ),后台业务系统收到该消息后会判断对应的订单是否已经完成支付。如 果未完成,则取消预订,将车票再次放回到票池;如果完成支付,则忽略。
2、延时等级
延时消息的延迟时长不支持随意时长的延迟,是通过特定的延迟等级来指定的。延时等级定义在RocketMQ服务端的MessageStoreConfig类中的如下变量中:
即,若指定的延时等级为3,则表示延迟时长为10s,即延迟等级是从1开始计数的。
当然,如果需要自定义的延时等级,可以通过在broker加载的配置中新增如下配置(例如下面增加了1 天这个等级1d)。配置文件在RocketMQ安装目录下的conf目录中。
messageDelayLevel = 1s 5s 10s 30s 1m 2m 3m 4m 5m 6m 7m 8m 9m 10m 20m 30m 1h 2h 1d |
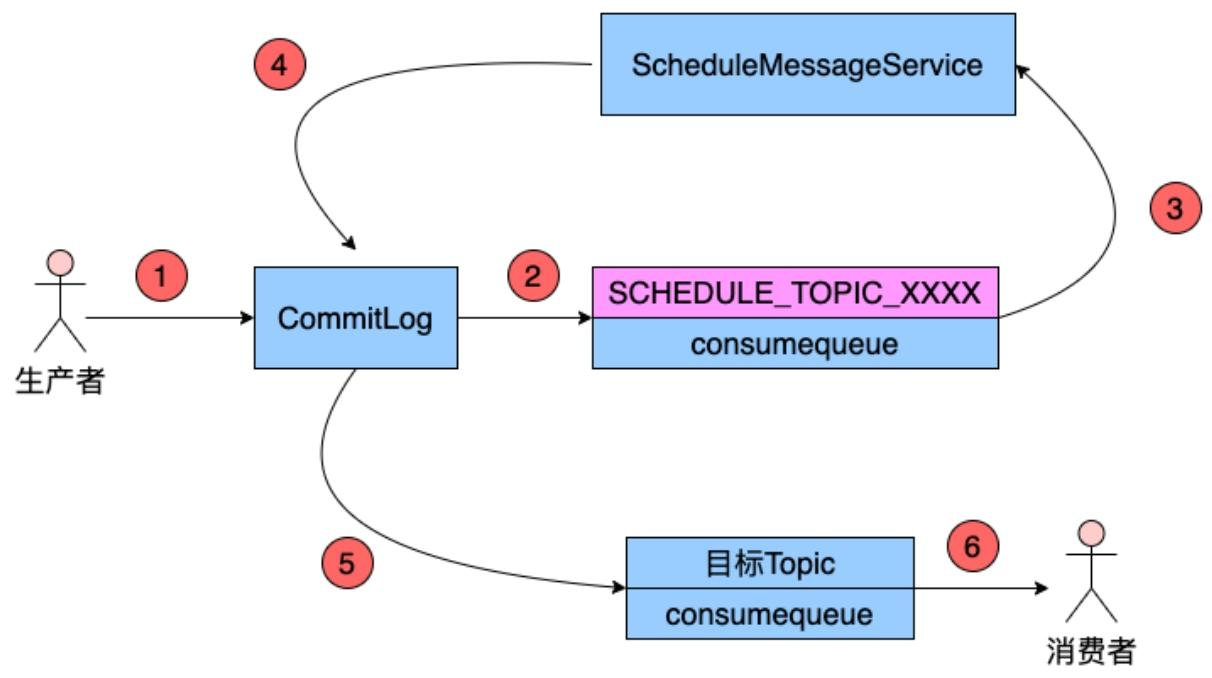
3、延时消息实现原理
具体实现方案是:
修改消息
Producer将消息发送到Broker后,Broker会首先将消息写入到commitlog文件,然后需要将其分发到相 应的consumequeue。不过,在分发之前,系统会先判断消息中是否带有延时等级。若没有,则直接正 常分发;若有则需要经历一个复杂的过程:
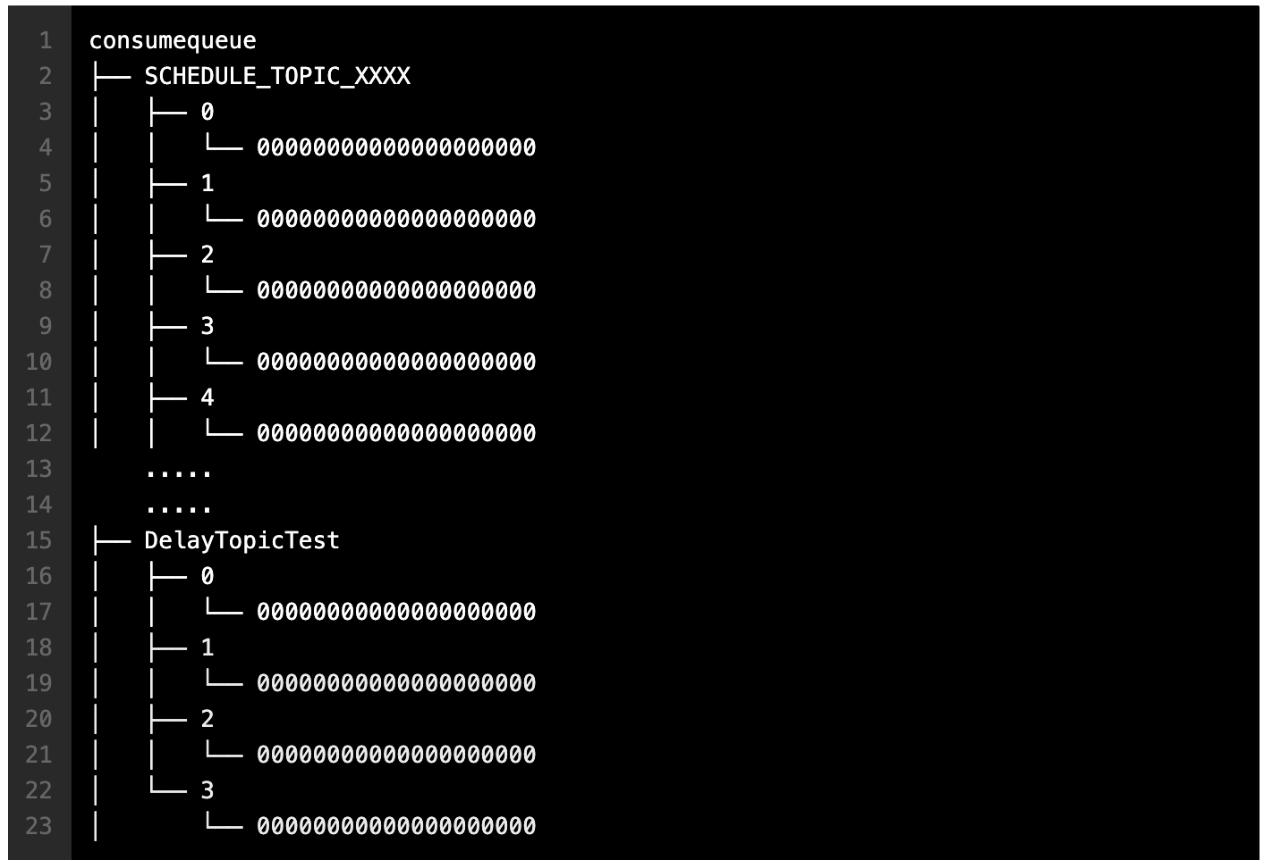
修改消息的Topic为SCHEDULE_TOPIC_XXXX
根据延时等级,在consumequeue目录中SCHEDULE_TOPIC_XXXX主题下创建出相应的queueId 目录与consumequeue文件(如果没有这些目录与文件的话)。
延迟等级 delayLevel 与 queueId 的对应关系为 queueId = delayLevel -1
需要注意,在创建 queueId 目录时,并不是一次性地将所有延迟等级对应的目录全部创建完毕, 而是用到哪个延迟等级创建哪个目录

修改消息索引单元内容。索引单元中的Message Tag HashCode部分原本存放的是消息的Tag的 Hash值。现修改为消息的
投递时间。投递时间是指该消息被重新修改为原Topic后再次被写入到 commitlog中的时间。投递时间 = 消息存储时间 + 延时等级时间。消息存储时间指的是消息被发送到Broker时的时间戳。将消息索引写入到SCHEDULE_TOPIC_XXXX主题下相应的consumequeue中
SCHEDULE_TOPIC_XXXX 目录中各个延时等级 Queue 中的消息是如何排序的?
是按照消息投递时间排序的。一个 Broker 中同一等级的所有延时消息会被写入到 consumequeue 目录中 SCHEDULE_TOPIC_XXXX 目录下相同 Queue 中。即一个 Queue 中消息投递时间的延迟等级时间是相同的。那么投递时间就取决于于
消息存储时间了。即按照消息被发送到 Broker 的时间进行排序的。
投递延时消息
Broker内部有⼀个延迟消息服务类ScheduleMessageService,其会消费SCHEDULE_TOPIC_XXXX中的消 息,即按照每条消息的投递时间,将延时消息投递到⽬标Topic中。不过,在投递之前会从commitlog 中将原来写入的消息再次读出,并将其原来的延时等级设置为0,即原消息变为了一条不延迟的普通消 息。然后再次将消息投递到目标Topic中。
ScheuleMessageService在Broker启动时,会创建并启动一个定时器Timer,用于执行相应的定时任务。系统会根据延时等级的个数,定义相应数量的TimerTask,每个TimerTask负责一个延迟 等级消息的消费与投递。每个TimerTask都会检测相应Queue队列的第一条消息是否到期(会检测Message Tag HashCode 因为 Message Tag HashCode 里面有投递时间的Hash值,投递时间在broker是按照顺序存放的)。若第一条消息未到期,则后面的所有消息更不会到期(消息是按照投递时间排序的);若第一条消息到期了,则将该消息投递到目标Topic,即消费该消息。
将消息重新写入commitlog
延迟消息服务类ScheuleMessageService将延迟消息再次发送给了commitlog,并再次形成新的消息索 引条目,分发到相应Queue。
这其实就是一次普通消息发送。只不过这次的消息Producer是延迟消息服务类 ScheuleMessageService。
4、代码举例
定义ScheduleMessage类
package com.lazy.rocketmqtest.schedule; |
定义ConsumerMessage类
package com.lazy.rocketmqtest.schedule; |
四、事务消息
1、问题引入
这里的一个需求场景是:工行用户A向建行用户B转账1万元。
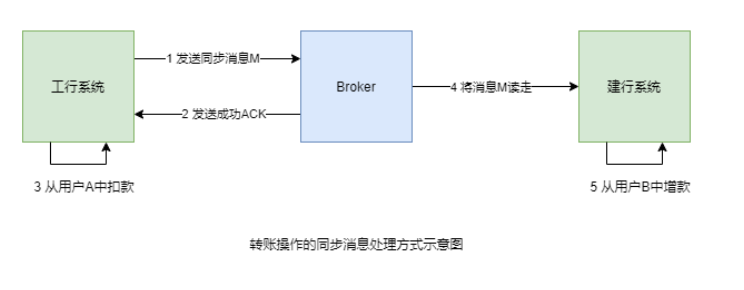
我们可以使用同步消息来处理该需求场景:
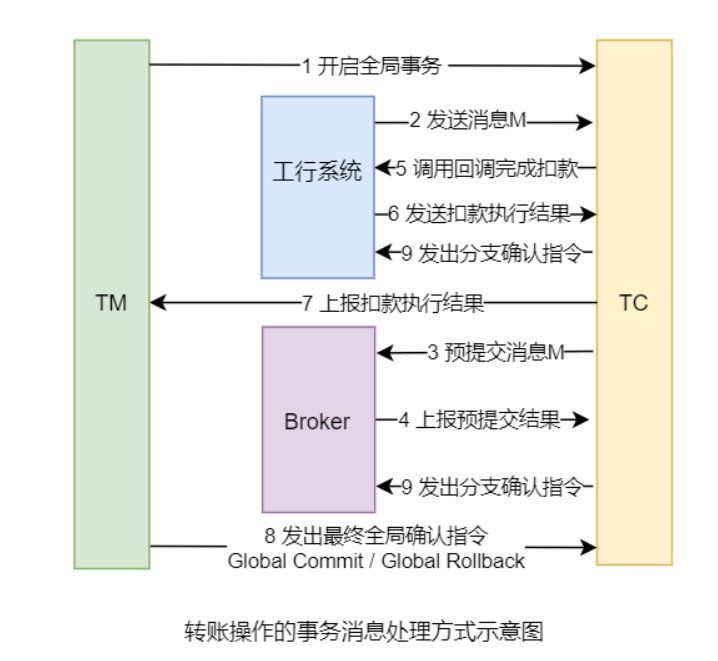
用事务消息保证消息发送与扣款的原子性,通过事务管理器(TM)、协调器(TC)、资源管理器(RM)协同,确保操作要么全成功、要么全失败。
- 工行系统发送一个给B增款1万元的同步消息M给Broker
- 消息被Broker成功接收后,向工行系统发送成功ACK
- 工行系统收到成功ACK后从用户A中扣款1万元
- 建行系统从Broker中获取到消息M
- 建行系统消费消息M,即向用户B中增加1万元
这其中是有问题的:若第 3 步中的扣款操作失败,但消息已经成功发送到了 Broker 。对于 MQ 来 说,只要消息写入成功,那么这个消息就可以被消费。此时建行系统中用户 B 增加了 1 万元。出 现了数据不一致问题。
2、解决思路
解决思路是,让第1、2、3步具有原子性,要么全部成功,要么全部失败。即消息发送成功后,必须要保证扣款成功。如果扣款失败,则回滚发送成功的消息。而该思路即使用事务消息。这里要使用分布式事务解决方案
使用事务消息来处理该需求场景:
- 事务管理器TM向事务协调器TC发起指令,开启
全局事务 - 工行系统发一个给B增款1万元的事务消息M给TC
- TC会向Broker发送
半事务消息prepareHalf,将消息M预提交到Broker。此时的建行系统是看 不到Broker中的消息M的 - Broker会将预提交执行结果Report给TC。
- 如果预提交失败,则TC会向TM上报预提交失败的响应,全局事务结束;如果预提交成功,TC会 调用工行系统的
回调操作,去完成工行用户A的预扣款1万元的操作 - 工行系统会向TC发送预扣款执行结果,即
本地事务的执行状态 - TC收到预扣款执行结果后,会将结果上报给TM。
预扣款执行结果存在三种可能性:
public enum LocalTransactionState {
COMMIT_MESSAGE, // 本地事务执行成功
ROLLBACK_MESSAGE, // 本地事务执行失败
UNKNOW, // 不确定,表示需要进行回查以确定本地事务的执行结果
}
- TM会根据上报结果向TC发出不同的确认指令
- 若预扣款成功(本地事务状态为COMMIT_MESSAGE),则TM向TC发送Global Commit指令
- 若预扣款失败(本地事务状态为ROLLBACK_MESSAGE),则TM向TC发送Global Rollback指令
- 若现未知状态(本地事务状态为UNKNOW),则会触发工行系统的本地事务状态
回查操作。回查操作会将回查结果,即COMMIT_MESSAGE或ROLLBACK_MESSAGE Report给TC。TC将结果上 报给TM,TM会再向TC发送最终确认指令Global Commit或Global Rollback
- TC在接收到指令后会向Broker与工行系统发出确认指令
- TC接收的若是Global Commit指令,则向Broker与工行系统发送Branch Commit指令。此时 Broker中的消息M才可被建行系统看到;此时的工行用户A中的扣款操作才真正被确认
- TC接收到的若是Global Rollback指令,则向Broker与工行系统发送Branch Rollback指令。此时 Broker中的消息M将被撤销;工行用户A中的扣款操作将被回滚
以上方案就是为了确保
消息投递与扣款操作能够在一个事务中,要成功都成功,有一个失败, 则全部回滚。以上方案并不是一个典型的 XA 模式。因为 XA 模式中的分支事务是异步的,而事务消息方案中的 消息预提交与预扣款操作间是同步的。
3、基础
分布式事务
对于分布式事务,通俗地说就是,一次操作由若干分支操作组成,这些分支操作分属不同应用,分布在 不同服务器上。分布式事务需要保证这些分支操作要么全部成功,要么全部失败。分布式事务与普通事 务一样,就是为了保证操作结果的一致性。
事务消息
RocketMQ提供了类似X/Open XA的分布式事务功能,通过事务消息能达到分布式事务的最终一致。XA 是一种分布式事务解决方案,一种分布式事务处理模式。
半事务消息
暂不能投递的消息,发送方已经成功地将消息发送到了Broker,但是Broker未收到最终确认指令,此时 该消息被标记成“暂不能投递”状态,即不能被消费者看到。处于该种状态下的消息即半事务消息。
本地事务状态
Producer 回调操作执行的结果为本地事务状态,其会发送给TC,而TC会再发送给TM。TM会根据TC发 送来的本地事务状态来决定全局事务确认指令。
// 描述本地事务执行状态 |
消息回查
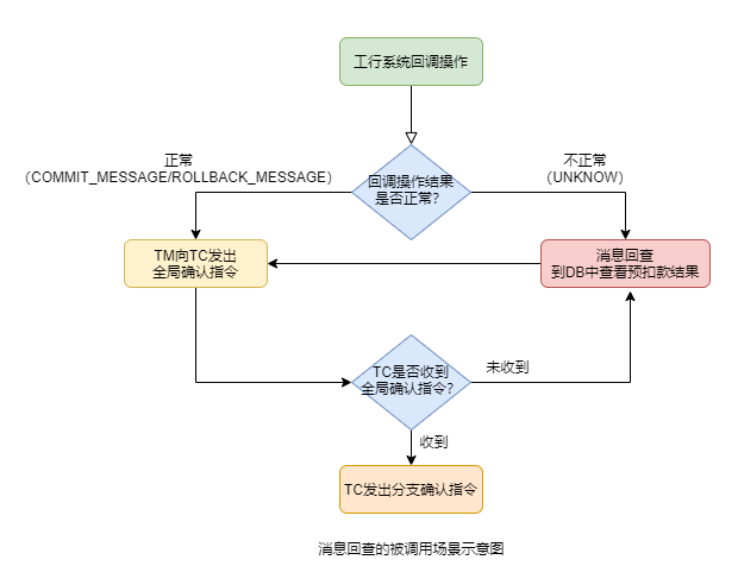
消息回查,即重新查询本地事务的执行状态。本例就是重新到DB中查看预扣款操作是否执行成功。
注意,消息回查不是重新执行回调操作。回调操作是进行预扣款操作,而消息回查则是查看预 扣款操作执行的结果。
引发消息回查的原因最常见的有两个:
- 回调操作返回UNKNWON
- TC没有接收到TM的最终全局事务确认指令
RocketMQ中的消息回查设置
关于消息回查,有三个常见的属性设置。它们都在broker加载的配置文件中设置,例如:
- transactionTimeout=20,指定TM在20秒内应将最终确认状态发送给TC,否则引发消息回查。默 认为60秒
- transactionCheckMax=5,指定最多回查5次,超过后将丢弃消息并记录错误日志。默认15次。
- transactionCheckInterval=10,指定设置的多次消息回查的时间间隔为10秒。默认为60秒。
4、XA模式三剑客
XA协议
XA(Unix Transaction)是一种分布式事务解决方案,一种分布式事务处理模式,是基于XA协议的。 XA协议由Tuxedo(Transaction for Unix has been Extended for Distributed Operation,分布式操作扩 展之后的Unix事务系统)首先提出的,并交给X/Open组织,作为资源管理器与事务管理器的接口标准。
XA模式中有三个重要组件:TC、TM、RM。
TC
Transaction Coordinator,事务协调者。维护全局和分支事务的状态,驱动全局事务提交或回滚。
RocketMQ中Broker充当着TC。
TM
Transaction Manager,事务管理器。定义全局事务的范围:开始全局事务、提交或回滚全局事务。它 实际是全局事务的发起者。
RocketMQ中事务消息的Producer充当着TM。
RM
Resource Manager,资源管理器。管理分支事务处理的资源,与TC交谈以注册分支事务和报告分支事 务的状态,并驱动分支事务提交或回滚。
RocketMQ中事务消息的Producer及Broker均是RM。
5、XA模式架构
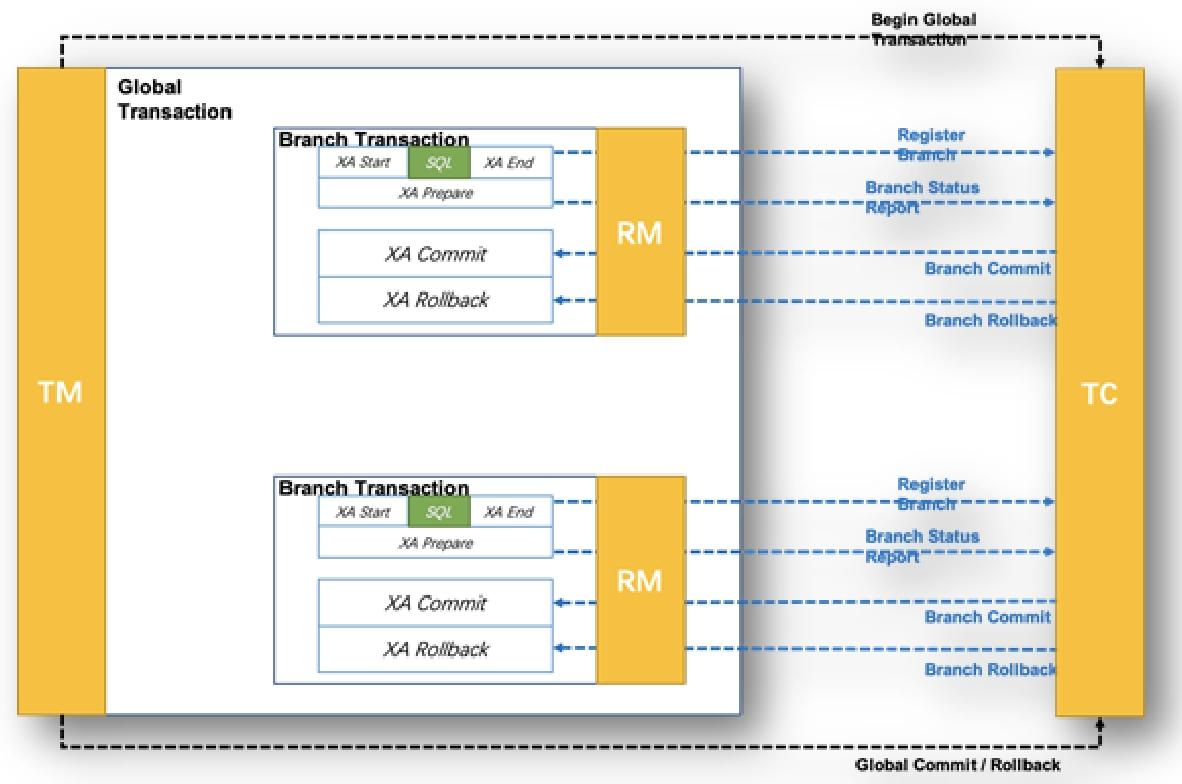
XA模式是一个典型的2PC,其执行原理如下:
- TM向TC发起指令,开启一个全局事务。
- 根据业务要求,各个RM会逐个向TC注册分支事务,然后TC会逐个向RM发出预执行指令。
- 各个RM在接收到指令后会在进行本地事务预执行。
- RM将预执行结果Report(上报)给TC。当然,这个结果可能是成功,也可能是失败。
- TC在接收到各个RM的 Report后会将汇总结果上报给TM,根据汇总结果TM会向TC发出确认指令。 若所有结果都是成功响应,则向TC发送Global Commit指令。 只要有结果是失败响应,则向TC发送Global Rollback指令。
- TC在接收到指令后再次向RM发送确认指令。
事务消息方案并不是一个典型的 XA 模式。因为 XA 模式中的分支事务是异步的,而事务消息方案 中的消息预提交与预扣款操作间是同步的。
6、注意
- 事务消息不支持延时消息
- 对于事务消息要做好幂等性检查,因为事务消息可能不止一次被消费(因为存在回滚后再提交的情况)
7、代码举例
定义事务消息监听器
package com.lazy.rocketmqtest.transaction; |
定义事物消息生产者
package com.lazy.rocketmqtest.transaction; |
定义消费者
package com.lazy.rocketmqtest.transaction; |
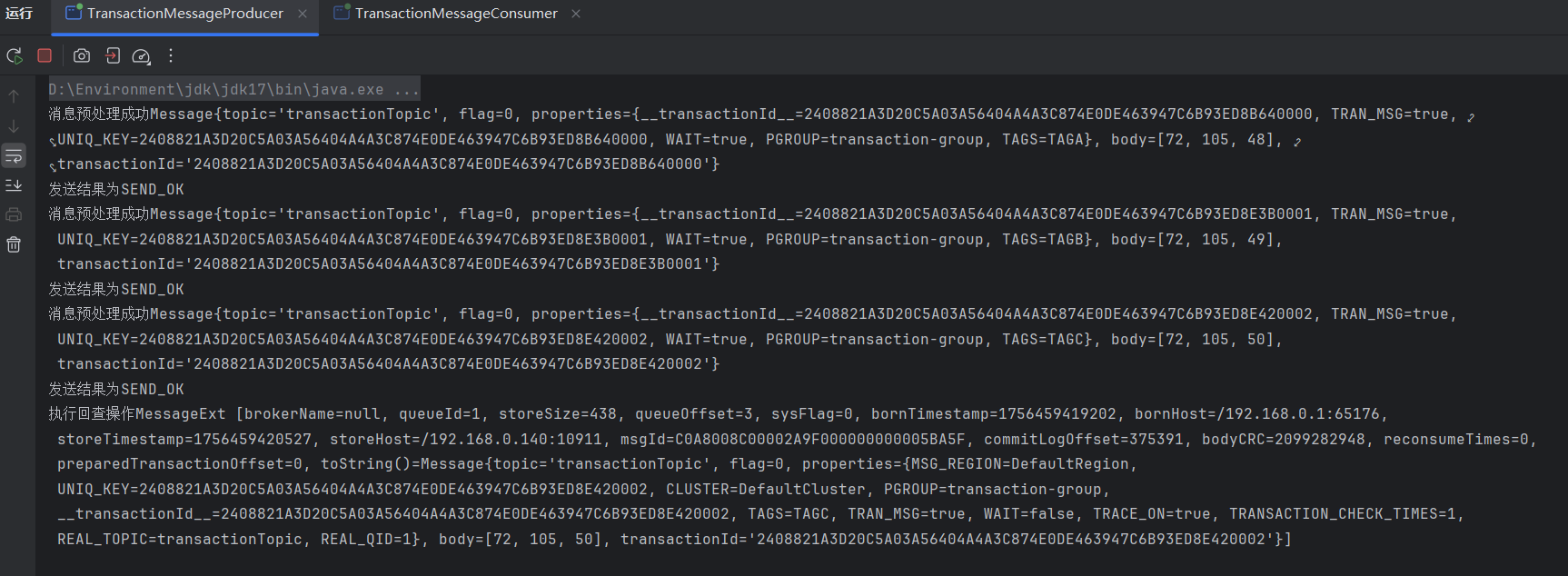
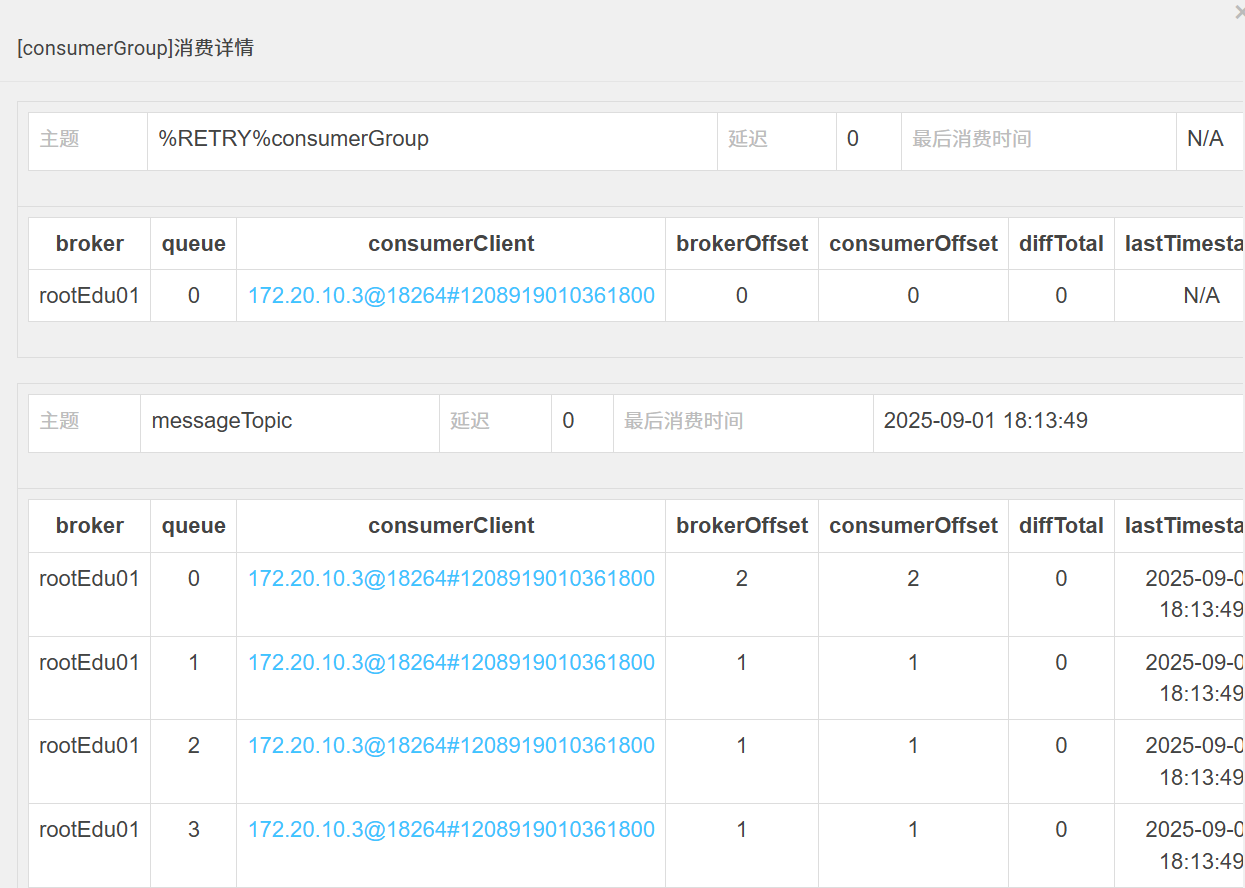
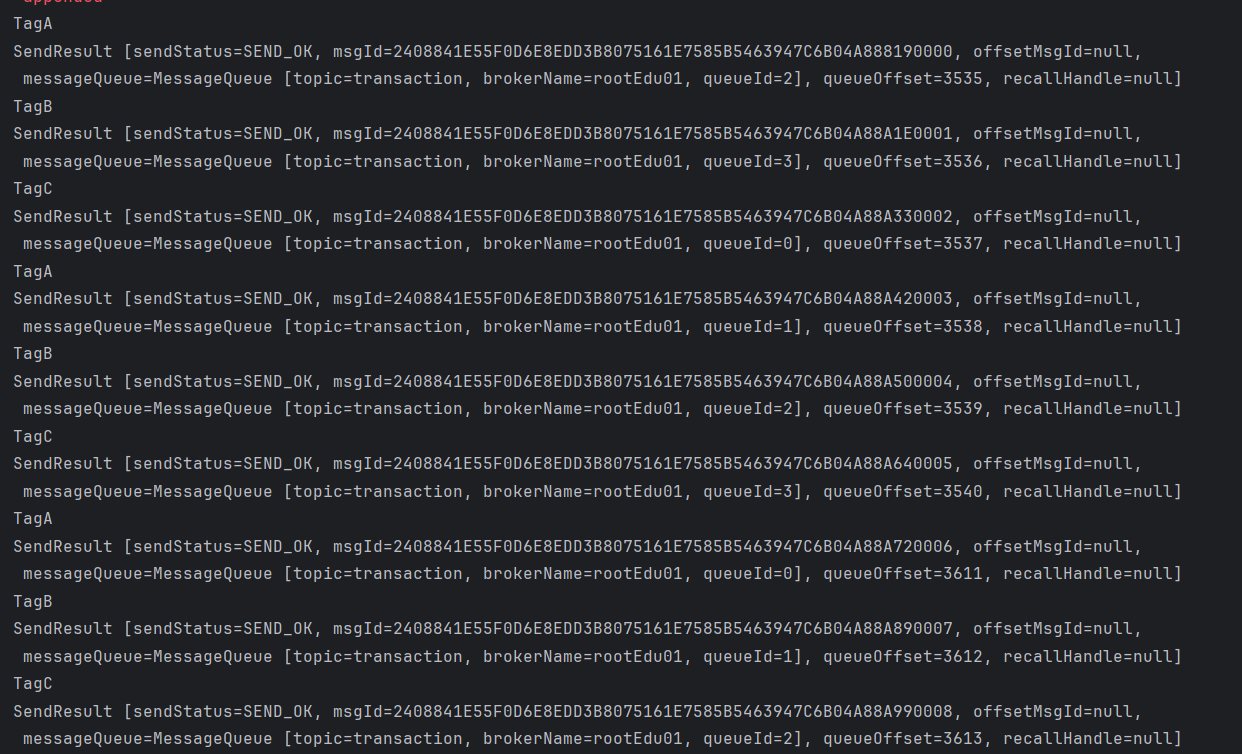
生产者
消费者
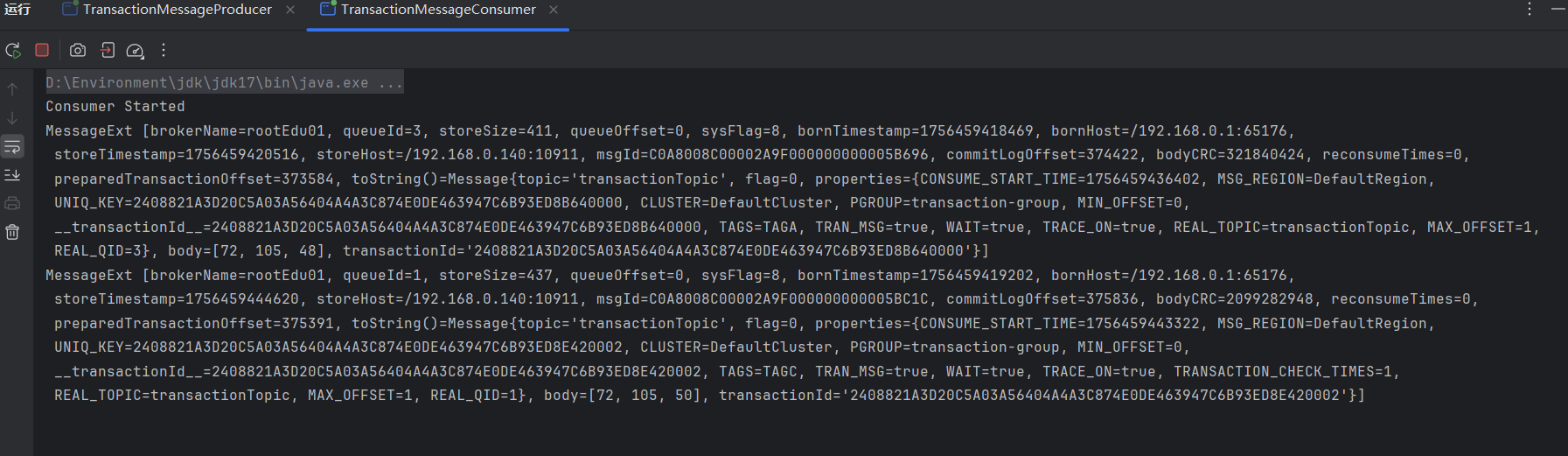
生产者明明生产了三条消息,为什么消费者,只消费了两条消息?
- 因为
TAGA是COMMIT_MESSAGE执行成功了- 而
TAGB是ROLLBACK_MESSAGE回滚了,撤回了TAGC是UNKNOW不确定,然后回查了,但是执行完回查方法后COMMIT_MESSAGE
所以显示
TAGA和TAGC不显示TAGB的原因,也就是只显示消费者消费了两条消息
五、批量消息
1、批量发送消息
发送限制
生产者进行消息发送时可以一次发送多条消息,这可以大大提升Producer的发送效率。不过需要注意以下几点:
- 批量发送的消息必须具有相同的Topic
- 批量发送的消息必须具有相同的刷盘策略
- 批量发送的消息不能是延时消息与事务消息
批量发送大小
默认情况下,一批发送的消息总大小不能超过4MB字节。如果想超出该值,有两种解决方案:
- 方案一:将批量消息进行拆分,拆分为若干不大于4M的消息集合分多次批量发送
- 方案二:在Producer端与Broker端修改属性
Producer端需要在发送之前设置Producer的maxMessageSize属性
Broker端需要修改其加载的配置文件中的maxMessageSize属性
生产者发送的消息大小
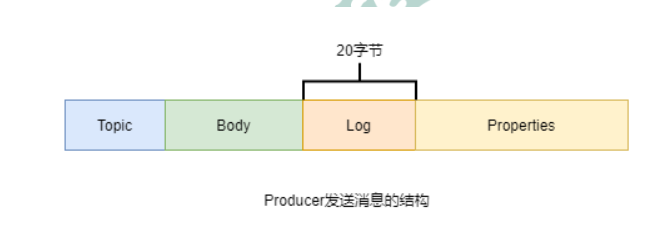
生产者通过send()方法发送的Message,并不是直接将Message序列化后发送到网络上的,而是通过这 个Message生成了一个字符串发送出去的。这个字符串由四部分构成:Topic、消息Body、消息日志 (占20字节),及用于描述消息的一堆属性key-value。这些属性中包含例如生产者地址、生产时间、 要发送的QueueId等。最终写入到Broker中消息单元中的数据都是来自于这些属性。
2、批量消费消息
修改批量属性
Consumer的MessageListenerConcurrently监听接口的consumeMessage()方法的第一个参数为消息列 表,但默认情况下每次只能消费一条消息。若要使其一次可以消费多条消息,则可以通过修改 Consumer的consumeMessageBatchMaxSize属性来指定。不过,该值不能超过32。因为默认情况下消费者每次可以拉取的消息最多是32条(例如一次最多消费消息为8条,默认拉取是32条,那么这32条消息要消费4次)。若要修改一次拉取的最大值,则可通过修改Consumer的 pullBatchSize属性来指定。
存在问题
Consumer的pullBatchSize属性与consumeMessageBatchMaxSize属性是否设置的越大越好?当然不是。
- pullBatchSize值设置的越大,Consumer每拉取一次需要的时间就会越长,且在网络上传输出现 问题的可能性就越高。若在拉取过程中若出现了问题,那么本批次所有消息都需要全部重新拉取。
- consumeMessageBatchMaxSize值设置的越大,Consumer的消息并发消费能力越低,且这批被消费的消息具有相同的消费结果(例如:消费这30条消息,但是有一个消息有问题,这30条消息得重新拉取消费)。因为consumeMessageBatchMaxSize指定的一批消息只会使用一 个线程进行处理,且在处理过程中只要有一个消息处理异常,则这批消息需要全部重新再次消费处理。
3、代码举例
该批量发送的需求是,不修改最大发送4M的默认值,但要防止发送的批量消息超出4M的限制。
定义消息列表分割器
package com.lazy.rocketmqtest.batch; |
定义批量消息生产者
package com.lazy.rocketmqtest.batch; |
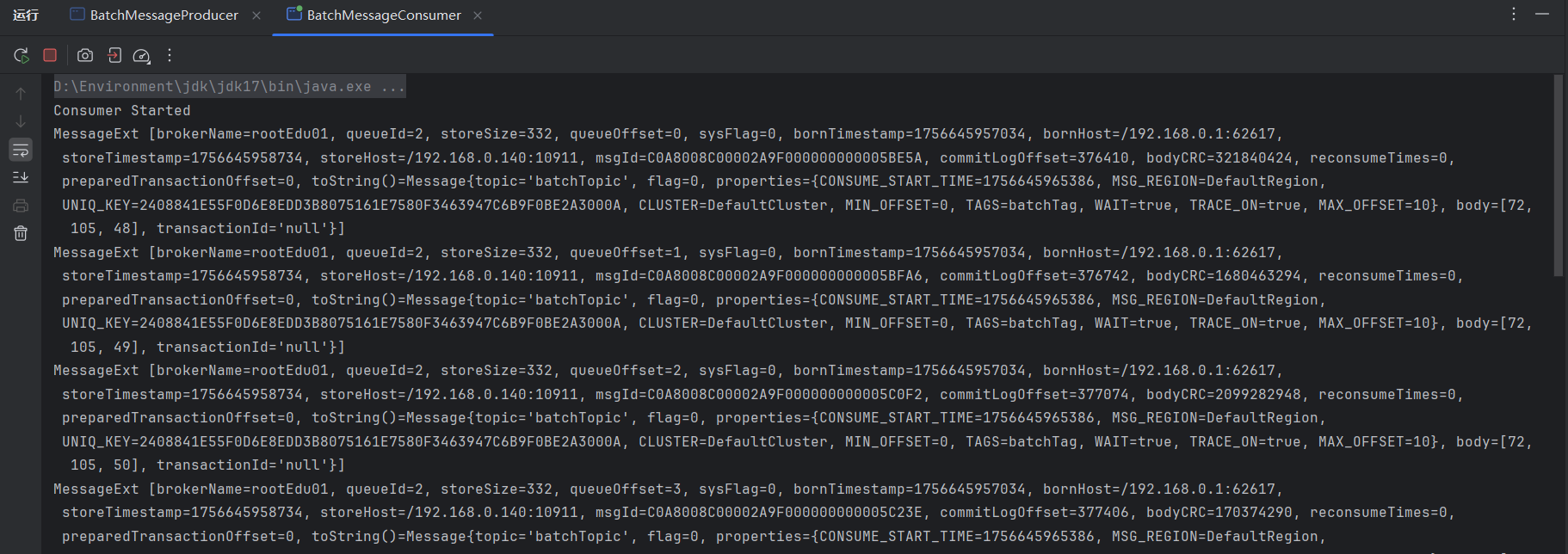
定义批量消息消费者
package com.lazy.rocketmqtest.batch; |
六、消息过滤
消息者在进行消息订阅时,除了可以指定要订阅消息的Topic外,还可以对指定Topic中的消息根据指条件进行过滤,即可以订阅比Topic更加细粒度的消息类型。
对于指定Topic消息的过滤有两种过滤方式:Tag过滤与SQL过滤。
1、Tag过滤
通过consumer的subscribe()方法指定要订阅消息的Tag。如果订阅多个Tag的消息,Tag间使用或运算 符(双竖线||)连接。
DefaultMQPushConsumer consumer = new |
2、SQL过滤
SQL过滤是一种通过特定表达式对事先埋入到消息中的用户属性进行筛选过滤的方式。通过SQL过滤, 可以实现对消息的复杂过滤。不过,只有使用PUSH模式的消费者才能使用SQL过滤。
SQL过滤表达式中支持多种常量类型与运算符。
支持的常量类型:
- 数值:比如:123,3.1415
- 字符:必须用单引号包裹起来,比如:’abc’
- 布尔:TRUE 或 FALSE
- NULL:特殊的常量,表示空
支持的运算符有:
- 数值比较:>,>=,<,<=,BETWEEN,=
- 字符比较:=,<>,IN
- 逻辑运算 :AND,OR,NOT NULL
- 判断:IS NULL 或者 IS NOT NULL
默认情况下Broker没有开启消息的SQL过滤功能,需要在Broker加载的配置文件中添加如下属性,以开启该功能:
enablePropertyFilter = true |
在启动Broker时需要指定这个修改过的配置文件。例如对于单机Broker的启动,其修改的配置文件是 conf/broker.conf,启动时使用如下命令:
nohup sh bin/mqbroker -n localhost:9876 -c conf/broker.conf & |
3、代码举例
定义Tag过滤Producer
package com.lazy.rocketmqtest.filter; |
定义Tag过滤Consumer
package com.lazy.rocketmqtest.filter; |
效果
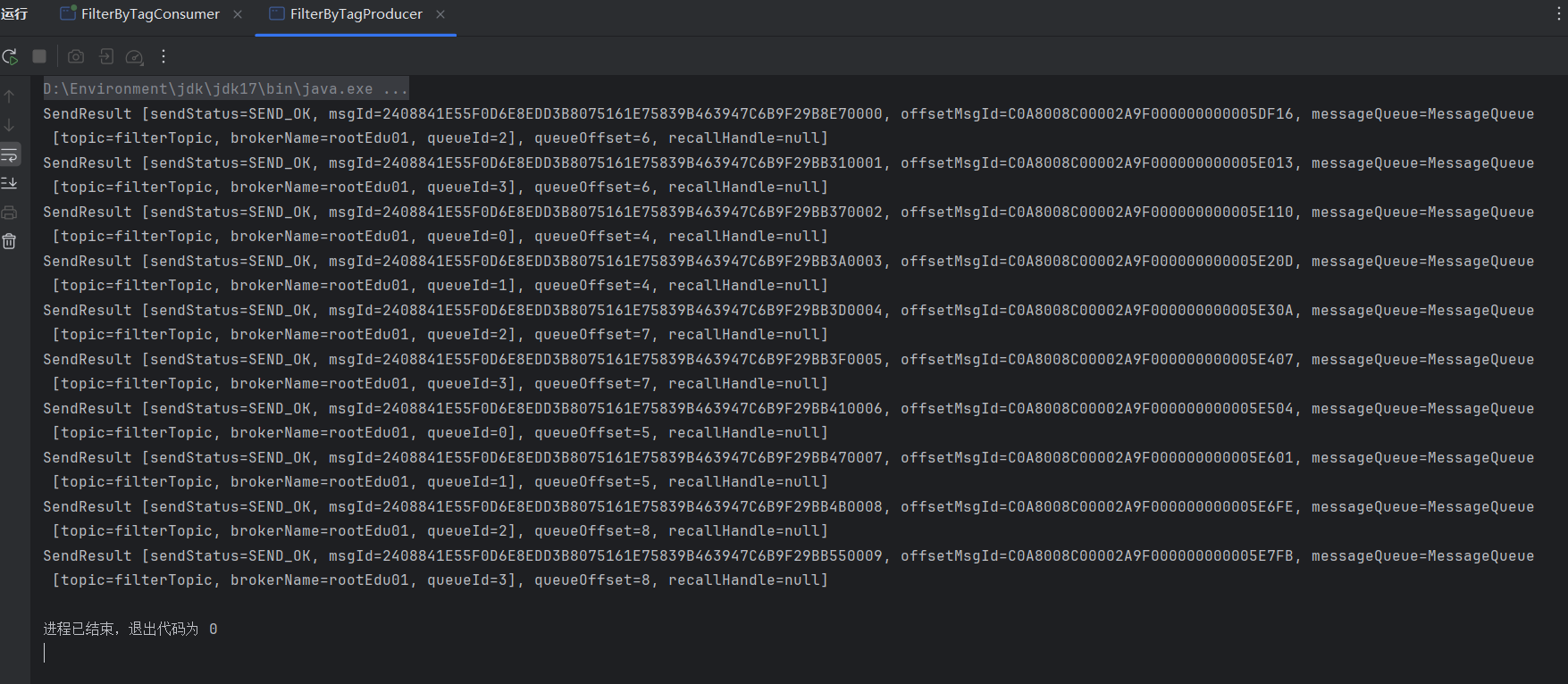
consumer
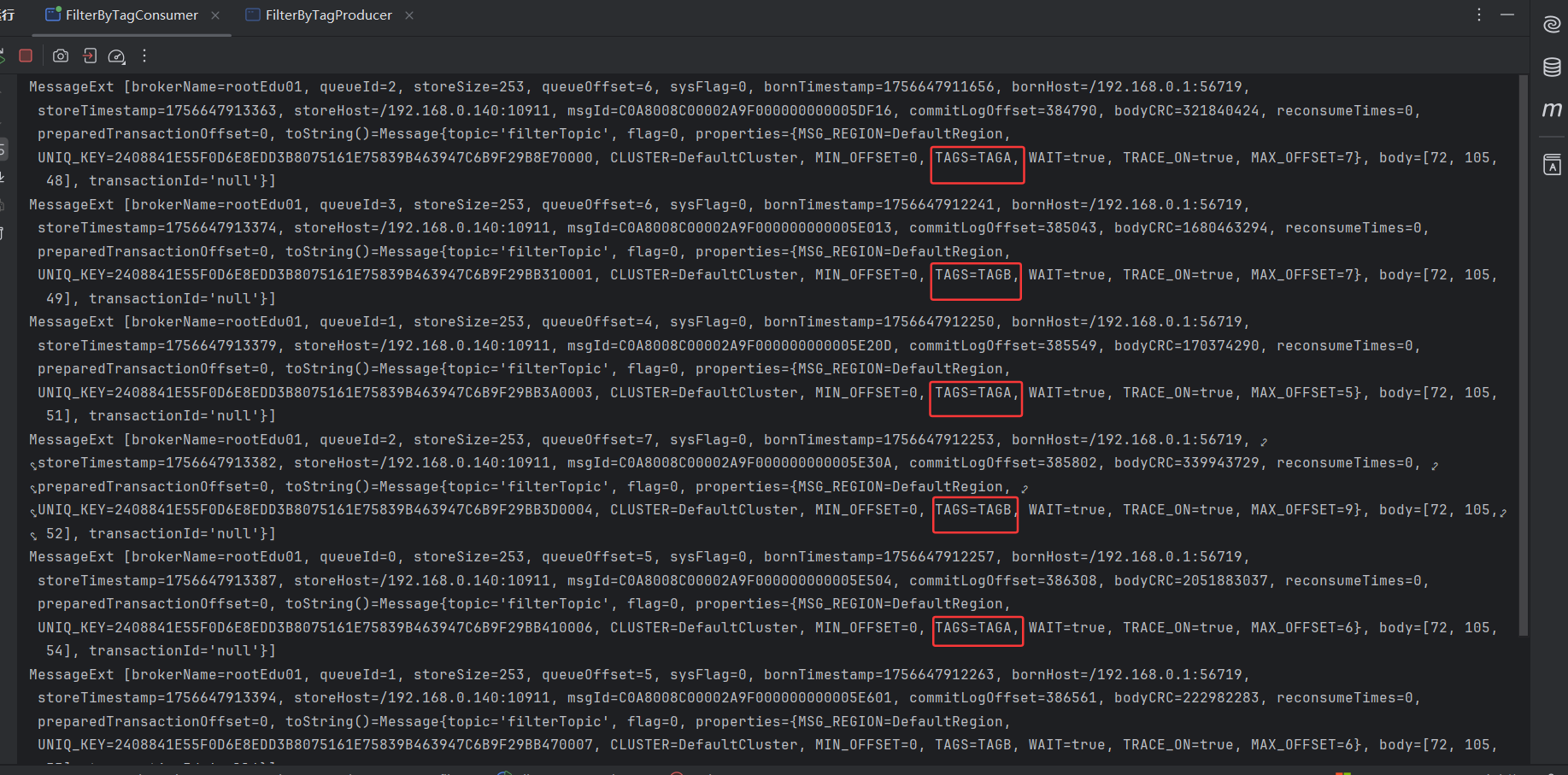
他只消费了,TAGA和TAGB没有消费TAGC
定义SQL过滤Producer
package com.lazy.rocketmqtest.filter; |
定义SQL过滤Consumer
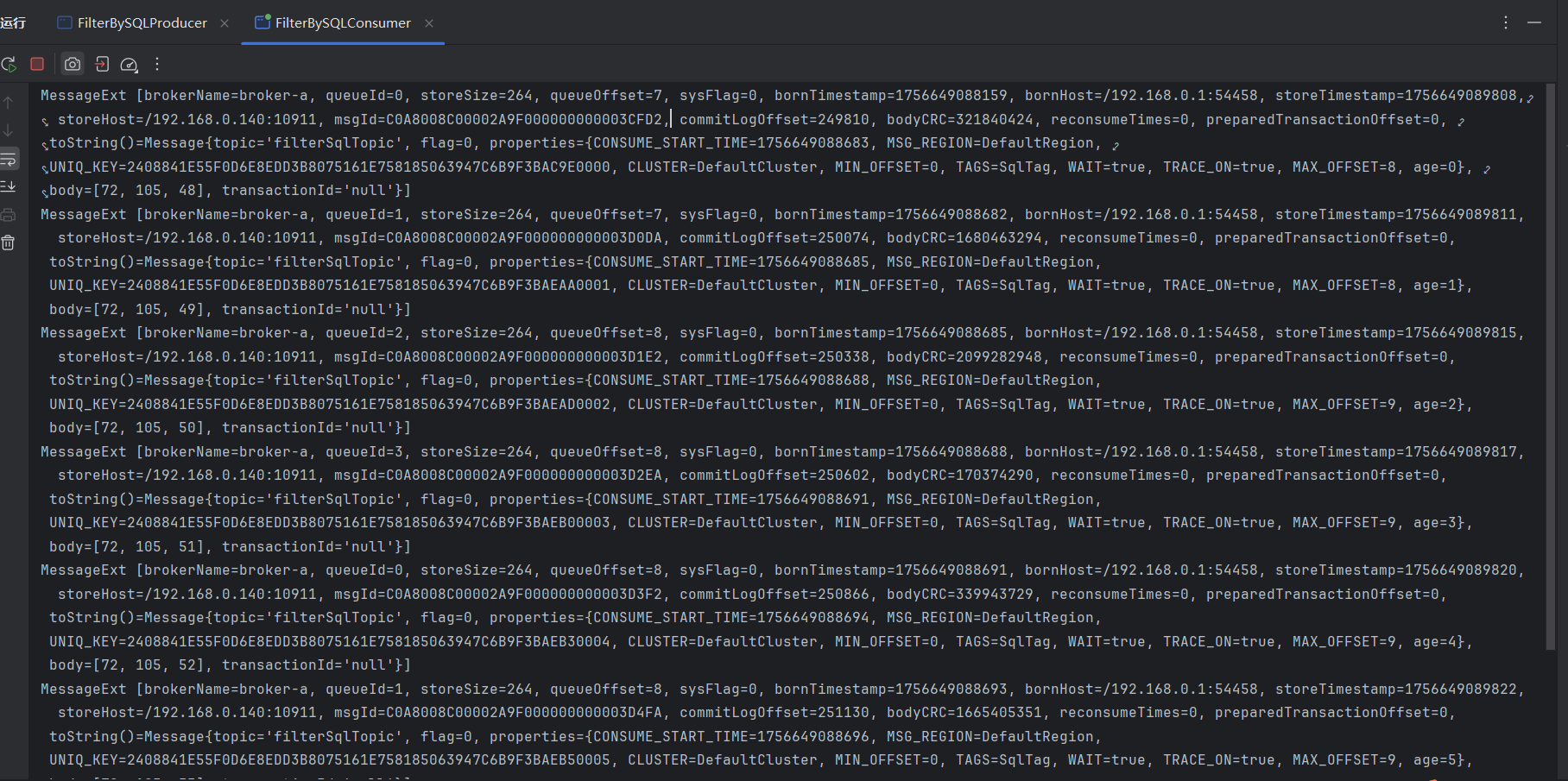
package com.lazy.rocketmqtest.filter; |
效果
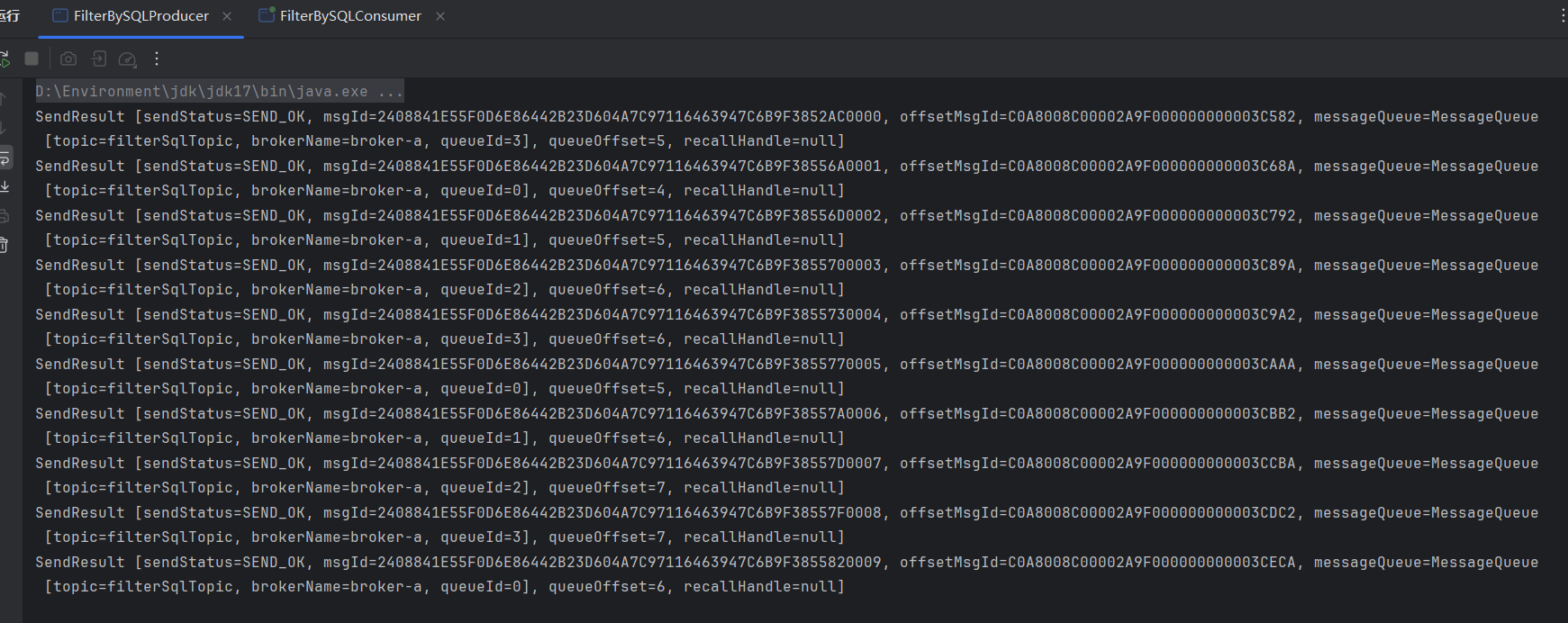
consumer
七、消息发送重试机制
1、说明
Producer对发送失败的消息进行重新发送的机制,称为消息发送重试机制,也称为消息重投机制。
对于消息重投,需要注意以下几点:
- 生产者在发送消息时,若采用
同步或异步发送方式,发送失败会重试,但oneway(单向发送)消息发送方式发送失败是没有重试机制的 - 只有普通消息具有发送重试机制,顺序消息是没有的
- 消息重投机制可以保证消息尽可能发送成功、不丢失,但可能会造成消息重复。消息重复在 RocketMQ中是无法避免的问题
- 消息重复在一般情况下不会发生,当出现消息量大、网络抖动,消息重复就会成为大概率事件 producer主动重发、consumer负载变化(发生Rebalance,不会导致消息重复,但可能出现重复消费)也会导致重复消息
- 消息重复无法避免,但要避免消息的重复消费。
- 避免消息重复消费的解决方案是,为消息添加唯一标识(例如消息key),使消费者对消息进行消费判断来避免重复消费
- 消息发送重试有三种策略可以选择:同步发送失败策略、异步发送失败策略、消息刷盘失败策略
2、同步发送失败策略
对于普通消息,消息发送默认采用round-robin策略来选择所发送到的队列。如果发送失败,默认重试2 次。但在重试时是不会选择上次发送失败的Broker,而是选择其它Broker。当然,若只有一个Broker其也只能发送到该Broker,但其会尽量发送到该Broker上的其它Queue。
// 创建一个producer,参数为Producer Group名称 |
同时,Broker还具有失败隔离功能,使Producer尽量选择未发生过发送失败的Broker作为目标 Broker。其可以保证其它消息尽量不发送到问题Broker,为了提升消息发送效率,降低消息发送耗时。
思考:让我们自己实现
失败隔离功能,如何来做?
- 方案一: Producer 中维护某 JUC 的 Map 集合,其 key 是发生失败的时间戳, value 为 Broker 实例。 Producer 中还维护着一个 Set 集合,其中存放着所有未发生发送异常的 Broker 实例。选择目标 Broker 是从该 Set 集合中选择的。再定义一个定时任务,定期从 Map 集合中将长期未发生发送 异常的 Broker 清理出去,并添加到 Set 集合。
- 方案二:为 Producer 中的 Broker 实例添加一个标识,例如是一个 AtomicBoolean 属性。只要该 Broker 上发生过发送异常,就将其置为 true 。选择目标 Broker 就是选择该属性值为 false 的 Broker 。再定义一个定时任务,定期将 Broker 的该属性置为 false 。
- 方案一和方案二都有一个问题,那就是定期时间无法确定,例如刚发送失败,就运行了定时任务,这是一个问题的缺陷!
- 方案三:为 Producer 中的 Broker 实例添加一个标识,例如是一个 AtomicLong 属性。只要该 Broker 上发生过发送异常,就使其值增一。选择目标 Broker 就是选择该属性值最小的 Broker 。若该值相同,采用轮询方式选择。
如果超过重试次数,则抛出异常,由Producer去保证消息不丢。当然当生产者出现 RemotingException、MQClientException和MQBrokerException时,Producer会自动重投消息。
3、异步发送失败策略
异步发送失败重试时,异步重试不会选择其他broker,仅在同一个broker上做重试,所以该策略无法保 证消息不丢。
DefaultMQProducer producer = new DefaultMQProducer("pg"); |
4、消息刷盘失败策略
消息刷盘超时(Master或Slave)或slave不可用(slave在做数据同步时向master返回状态不是 SEND_OK)时,默认是不会将消息尝试发送到其他Broker的。不过,对于重要消息可以通过在Broker 的配置文件设置retryAnotherBrokerWhenNotStoreOK属性为true来开启。
八、消息消费重试机制
1、顺序消息的消费重试
对于顺序消息,当Consumer消费消息失败后,为了保证消息的顺序性,其会自动不断地进行消息重 试,直到消费成功。消费重试默认间隔时间为1000毫秒。重试期间应用会出现消息消费被阻塞的情况。
// 顺序消息消费失败的消费重试时间间隔,单位毫秒,默认为1000,其取值范围为[10, 30000]
consumer.setSuspendCurrentQueueTimeMillis(100);由于对顺序消息的重试是无休止的,不间断的,直至消费成功,所以,对于顺序消息的消费, 务必要保证应用能够及时监控并处理消费失败的情况,避免消费被永久性阻塞。
注意,顺序消息没有发送失败重试机制,但具有消费失败重试机制
2、无序消息的消费重试
对于无序消息(普通消息、延时消息、事务消息),当Consumer消费消息失败时,可以通过设置返回状态达到消息重试的效果。不过需要注意,无序消息的重试只对集群消费方式生效,广播消费方式不 提供失败重试特性。即对于广播消费,消费失败后,失败消息不再重试,继续消费后续消息。
3、消费重试次数与间隔
对于无序消息集群消费下的重试消费,每条消息默认最多重试16次,但每次重试的间隔时间是不同 的,会逐渐变长。每次重试的间隔时间如下表。
| 重试次数 | 与上次重试的间隔时间 | 重试次数 | 与上次重试的间隔时间 |
| :——: | :——————: | :——: | :——————: |
| 1 | 10秒 | 9 | 7分钟 |
| 2 | 30秒 | 10 | 8分钟 |
| 3 | 1分钟 | 11 | 9分钟 |
| 4 | 2分钟 | 12 | 10分钟 |
| 5 | 3分钟 | 13 | 20分钟 |
| 6 | 4分钟 | 14 | 30分钟 |
| 7 | 5分钟 | 15 | 1小时 |
| 8 | 6分钟 | 16 | 2小时 |
若一条消息在一直消费失败的前提下,将会在正常消费后的第
4小时46分后进行第 16 次重试。 若仍然失败,则将消息投递到死信队列
修改消费重试次数
// 修改消费重试次数
consumer.setMaxReconsumeTimes(10);对于修改过的重试次数,将按照以下策略执行:
- 若修改值小于 16 ,则按照指定间隔进行重试
- 若修改值大于 16 ,则超过 16 次的重试时间间隔均为 2 小时
对于 Consumer Group ,若仅修改了一个 Consumer 的消费重试次数,则会应用到该 Group 中所有 其它 Consumer 实例。若出现多个 Consumer 均做了修改的情况,则采用覆盖方式生效。即最后被修改的值会覆盖前面设置的值。
4、重试队列
对于需要重试消费的消息,并不是Consumer在等待了指定时长后再次去拉取原来的消息进行消费,而 是将这些需要重试消费的消息放入到了一个特殊Topic的队列中,而后进行再次消费的。这个特殊的队列就是重试队列。
当出现需要进行重试消费的消息时,Broker会为每个消费组都设置一个Topic名称 为%RETRY%consumerGroup@consumerGroup的重试队列。
- 这个重试队列是针对消费者组的,而不是针对每个 Topic 设置的(一个 Topic 的消息可以让多个消费者组进行消费,所以会为这些消费者组各创建一个重试队列)
- 只有当出现需要进行重试消费的消息时,才会为该消费者组创建重试队列
注意,消费重试的时间间隔与
延时消费的延时等级十分相似,除了没有延时等级的前两个时间外,其它的时间都是相同的
Broker对于重试消息的处理是通过延时消息实现的。先将消息保存到SCHEDULE_TOPIC_XXXX延迟队 列中,延迟时间到后,会将消息投递到%RETRY%consumerGroup@consumerGroup重试队列中。
5、消费重试配置方式
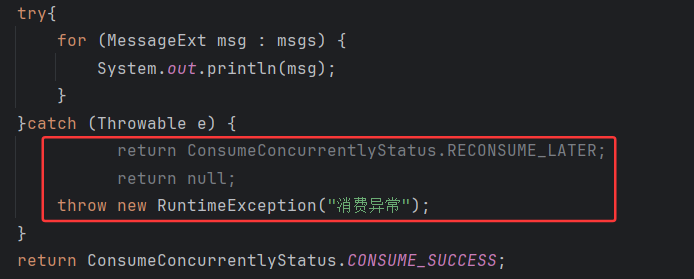
集群消费方式下,消息消费失败后若希望消费重试,则需要在消息监听器接口的实现中明确进行如下三种方式之一的配置:
- 方式1:返回ConsumeConcurrentlyStatus.RECONSUME_LATER(推荐)
- 方式2:返回Null
- 方式3:抛出异常
6、消费不重试配置方式
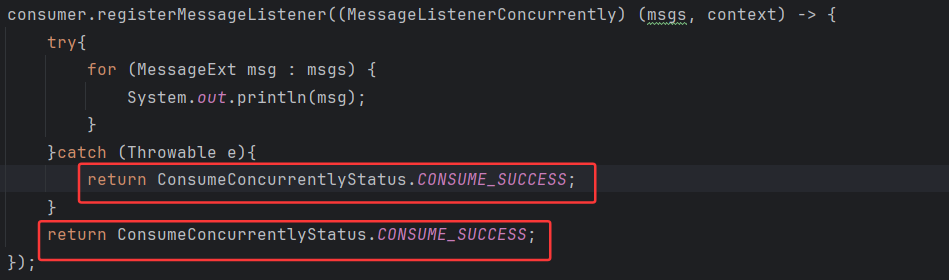
集群消费方式下,消息消费失败后若不希望消费重试,则在捕获到异常后同样也返回与消费成功后的相同的结果,即ConsumeConcurrentlyStatus.CONSUME_SUCCESS,则不进行消费重试。
九、死信队列
1、什么是死信队列
当一条消息初次消费失败,消息队列会自动进行消费重试;达到最大重试次数后,若消费依然失败,则 表明消费者在正常情况下无法正确地消费该消息,此时,消息队列不会立刻将消息丢弃,而是将其发送 到该消费者对应的特殊队列中。这个队列就是死信队列(Dead-Letter Queue,DLQ),而其中的消息 则称为死信消息(Dead-Letter Message,DLM)。
死信队列是用于处理无法被正常消费的消息的。
2、死信队列的特征
死信队列具有如下特征:
- 死信队列中的消息不会再被消费者正常消费,即DLQ对于消费者是不可见的
- 死信存储有效期与正常消息相同,均为 3 天(commitlog文件的过期时间),3 天后会被自动删除
- 死信队列就是一个特殊的Topic,名称为
%DLQ%consumerGroup@consumerGroup,即每个消费者组都有一个死信队列 - 如果⼀个消费者组未产生死信消息,则不会为其创建相应的死信队列
3、死信消息的处理
实际上,当⼀条消息进入死信队列,就意味着系统中某些地方出现了问题,从而导致消费者无法正常消 费该消息,比如代码中原本就存在Bug。因此,对于死信消息,通常需要开发人员进行特殊处理。最关键的步骤是要排查可疑因素,解决代码中可能存在的Bug,然后再将原来的死信消息再次进行投递消费。
SpringBoot集成RocketMQ
新建modelspringboot-rocketmq
引入依赖
<properties> |
再建两个小model,父项目springboot-rocketmq
第一个modelrocketmq-producer为生产者
pom
<properties> |
application.yaml
server: |
MyProducer
package com.lazy.producer; |
MyProducerTest
package com.lazy; |
第二个modelrocketmq-consumer为消费者
pom
<properties> |
application.yaml
server: |
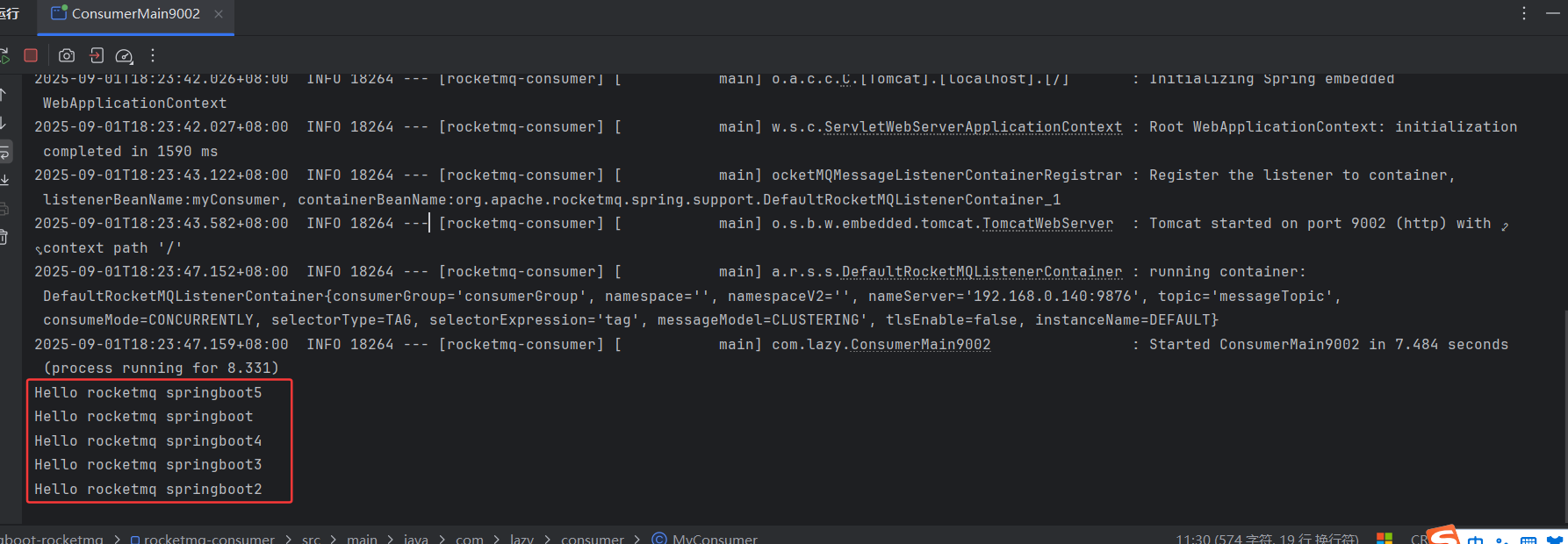
MyConsumer
package com.lazy.consumer; |
事务消息
package com.lazy.producer; |
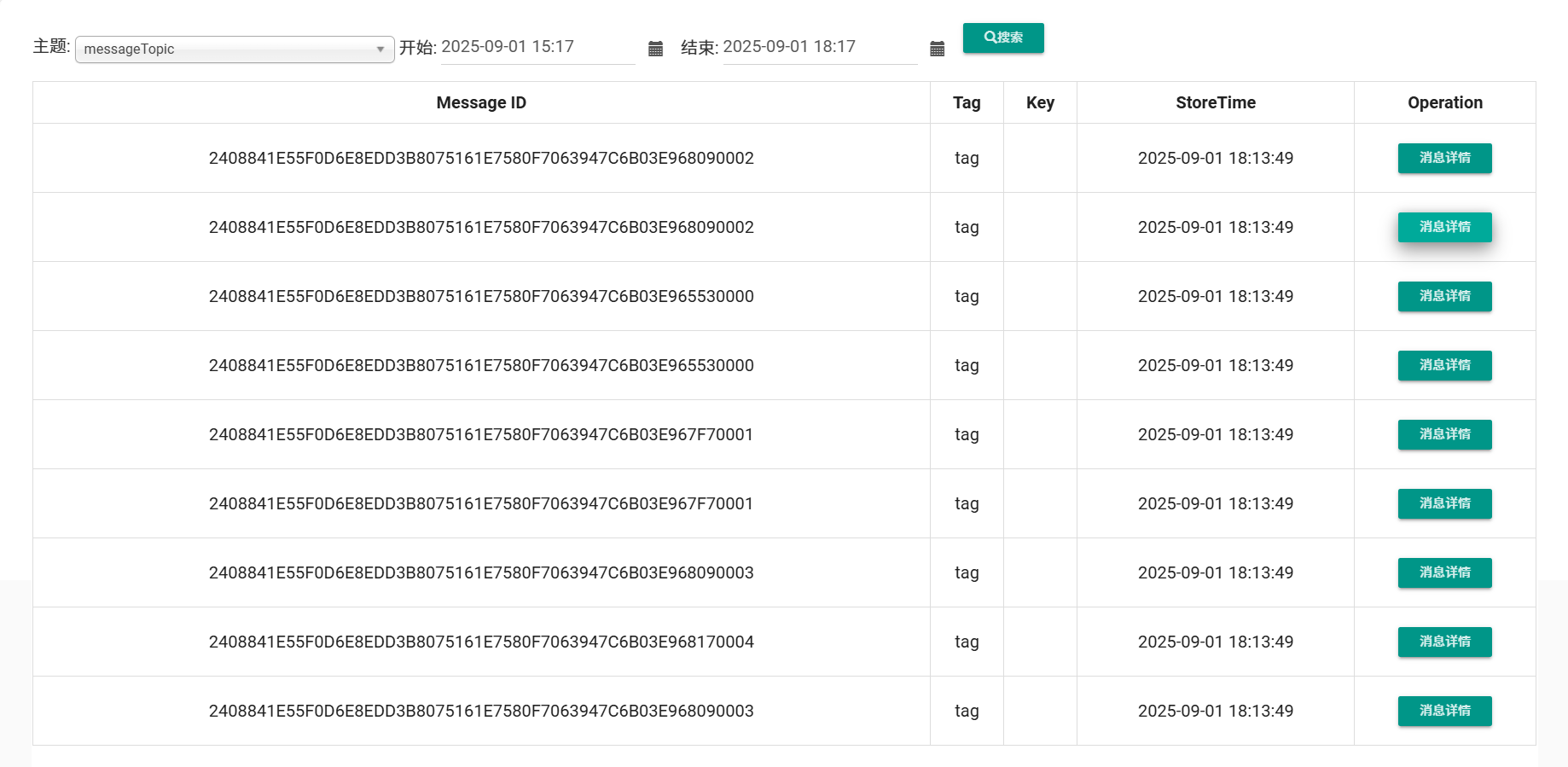
测试
package com.lazy.consumer; |
consumer
package com.lazy.transaction; |